自定义工程运动系统,运动控制平台,电机,科学研究机构,阶段和执行器,新万博英超h测试和检查,白皮书
白皮书
用于耐久性、零件特新万博英超h性和动态力学分析(DMA)的先进运动控制
本白皮书回顾了使用动态力学分析(DMA)和相关测试应用在试件上产生运动和施加力的技术。有关典型的DMA测试类型,请参见图1。
通常,在研究材料以了解它们的动态模量(弹性,拉伸强度等)时,存在兴趣,所述动态模量(弹性,拉伸强度等)描述了材料中应力和应变之间的关系。在研究小组件(减震器,橡胶安装件等)时,兴趣通常在各种操作条件下的小部件的耐用性。这两个测试都考虑了特定的操作点和频率范围,温度和/或位移。
基本上,这些测试是通过将标本放入一台机器进行的,该机器将:
- 向试样施加力并测量位移。施加的力可以是静态的或频率变化。
- 导致位移和测量力。通常,位移越过频率和/或距离范围。
- 在一些情况下,还测量或控制试样运动的速度和加速度。例如,可以期望将施加恒定加速度的变化位移的频率扫描,可以是可能的被测单元(UUT)。
传统上,这些应用使用伺服-液压解决方案-执行器和控制。新万博最新版本最近人们注意到,除了电动解决方案提供的“绿色”因素外,还使用电动执行器和伺服控制器来提供伺服液压解决方案无法实现的特性。新万博最新版本这并不是说电气解决方案在所有应用中都优于伺服液压。新万博最新版本与大多数工程决策一样,最佳解决方案取决于具体的需求。
| 动态力学分析(DMA) | DMA以循环方式将小线性运动施加到样品(例如橡胶)上。应力的强度是已知的并且测量样品的菌株。 |
| 动态机械热分析(DMTA) | DMTA与DMA相同,但在测试过程中也模拟环境条件(如紫外线固化、盐水、胃酸、高温或低温等)。 |
| 形变场分析(TMA) | TMA包括在恒定的静力下拉伸试样,然后加热或冷却试样以检测其变形。 |
| 疲劳试验 | 疲劳测试模拟了部件的使用和磨损,以提供估计的寿命。它以循环方式施加线性运动。许多消费产品已经测试过疲劳(例如,阻尼器,键盘,智能手机,鞋等)。 |
| 拉伸试验 | 拉伸测试包括缓慢增加施加到样品的力(张力)直至样品发生故障。 |
要考虑的设计因素
为了正确确定材料或部分特征,重要的是以完美的正弦模式创造运动或施加力。正弦运动/力的“质量”取决于执行器,测量装置,机械框架机械结构和使用的控制器。
根据具体的应用,电动,伺服液压或压电驱动可能是最好的。设计系统时需要考虑的因素包括:
- 施加力的幅度
- 所需的位移量
- 运动的频率
- 要求位移测量的分辨率
- 控制架构
许多制造和测试设施的当前趋势是“更环保”。这导致最终用户寻求传统伺服液压解决方案的替代品。更高的性能始终是竞争力的关键,因此需要更复杂的运动轮廓,并且需要更低的力分辨率和更好的力控制。
两种运动类型通常与样品或UUT一起使用:
- 正弦运动
- 议案的复制品将在运营中经验
正弦运动
正弦运动是理解UUT的频率响应所必需的。更高的性能系统需要更高的频率测试和更好的正弦曲线来刺激UUT。通常相位不是重要的,但幅度和正弦波保真度至关重要。在这种情况下,可以使用总谐波失真(THD)来测量正弦波保真度。实现此动作不是通常控制误差的常用问题,而是确保将完美的正弦波应用于UUT的频率范围。使用的算法和调谐技术将不同。调整低伺服误差较高的带宽通常更好;但是,为了实现低THD,环形成形可能更有效。使用的控制器与致动技术一样重要。例如,如果执行器是完美的(没有齿轮失真,没有摩擦,并且没有力限制),但命令的运动是不完善的,结果将同样不完美,测量值将不正确。
复制操作
在复制UUT在实际操作中所经历的动作时,需要收集UUT运行过程中的数据,然后在机器上回放。这里,轨迹生成和控制器采样时间是正确表示运动的关键。在回放测试中,相位比正弦波测试更为重要,通常机器设置优化了传统伺服跟踪误差。在回放模式中,通常重要的是复制UUT在操作中所经历的运动(有时在多个方向-即。多轴运动),以充分体现UUT的耐用性和操作性。在正弦波测试中,通常要测量材料的特性,正弦波的保真度(而不是相位)对这种计算很重要。一台可以同时测试这两种情况的机器需要一个灵活的控制器,可以根据不同的操作模式快速改变参数集。
适用的位移和力的准确和重合测量对于准确的模量来说很重要,以及了解UUT如何在实际使用中响应。因此,不仅需要具有正确的致动器,而且是可以同时,连续地和充分的分辨率进行采样的适当仪器(用于位移和力的反馈装置)(用于位移和力的反馈装置)。为了适应两种类型的测试,控制器应该足够灵活,可以快速切换机器设置以测试各种特性的各种样本。测试各种样本通常意味着更大的位移要求以适应一系列UUT。含义是,机器的动态响应必须在旅行中的任何点处等同于那个机器设置很快。
图1描绘了每个适用技术的典型范围。组合伺服液压设计(例如,单级和双级伺服执行器)。然而,示出了几个电动执行器。
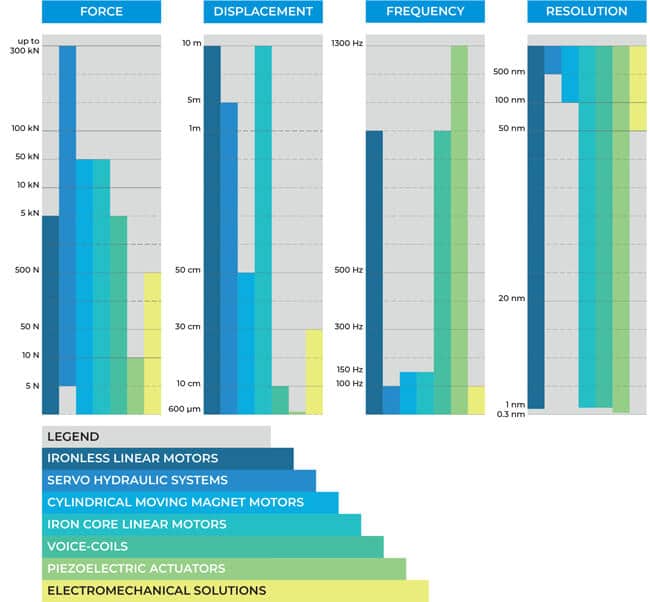
最容易比较的参数是位移。超过600微米的位移排除了压电致动器,超过10厘米的位移排除了声音线圈。滚珠-螺杆驱动执行机构的长度限制在30厘米左右。线性电机和伺服液压都能够达到5.0米的位移,这足以满足99%的DMA应用。需要大于50kn的力的应用需要伺服液压解决方案。新万博最新版本铁芯式电机适用于50kn以下,无铁电机适用于10kn以下。
最高频率(1300Hz)可以用压电致动器获得,然后是1000Hz的无铁电机和音圈。伺服液压系统通常限制为100Hz。
最小的位移分辨率,0.3 nm,可以实现与压电驱动器,其次是1 nm实现任何伺服电机技术。
广泛地说,非常高的力应用需要伺服液压解决方案,而非常高的频率,小位移应用需要压电驱动器。新万博最新版本10kn以下的电机技术是最佳选择。电机技术的选择-无铁,铁芯,或音圈-取决于位移和质量所需的运动。无铁电机将产生更好的质量运动比铁芯电机和任何旅行超过10厘米消除声音线圈。
技术评论
机电解决方案新万博最新版本

系统输入采用旋转电机,通过机电驱动将旋转运动机械转换为直线运动来完成直线运动。将旋转转换成直线运动最常用的技术有:
- 曲轴和杆
- 铅螺杆或球螺杆系统
- 皮带和滑轮
- 齿条和齿轮
- 齿轮
这些系统的主要优点是他们的价格。没有用于这些应用的旋转电机都是与类似的直接驱动线性电机一样昂贵。这些机电致动器适用于较低的性能,较少的通用分析仪。
机电执行器的限制包括:
- 对可变测试的灵活性较少
- 机械误差,如齿隙
- 由于磨损,使用寿命有限
- 应用线性运动中的扰动
- 可怜的准确性
- 带有双编码器的复杂反馈系统
- 较大的结构,以隔离诱导振动
- 排量限制在30厘米
直接驱动线性致动
直接驱动系统不需要机械转换的旋转线性运动,因此不遭受机电解决方案固有的问题。新万博最新版本不需要将旋转转换为线性运动,因此不需要齿条和小齿轮或齿轮或皮带和滑轮。直线运动是由磁场和永磁体的相互作用产生的。有几种类型的直接驱动直线驱动器可用:圆柱形移动磁铁,平铁芯和无铁,和u型通道无铁直线电机。
圆柱形移动磁铁线性电机
圆柱形运动磁铁直线电机是第一个找到重要商业应用的电磁直线电机,因为它们与液压缸的形状相同,易于更换。它们的工作方式与磁致动器(音圈)相同,但有相同数量的线圈来延长行程。
圆柱形运动磁铁直线电机的常见局限性是齿槽转矩和漏磁。齿槽转矩,也称为“无电流”转矩,来自于磁力和力的铁芯。它在运动中造成干扰,在某些情况下产生很大的摩擦,阻碍小的移动。齿槽扭矩甚至可以观察到,当手动移动电机时,可能发生,试图防止小的力量,从应用到软测试材料。根据机械分析仪的频率范围和位移要求,齿槽转矩可能妨碍该电机的使用。
漏磁是指磁场缺乏包容性。这应该谨慎考虑,特别是如果其他组件或被测样品对磁场敏感。
圆柱形移动磁体线性电动机的主要优点是它们是紧凑的。轴承通常与电动机成一体,并且它也可以实现比无铁线性电动机更高的力。
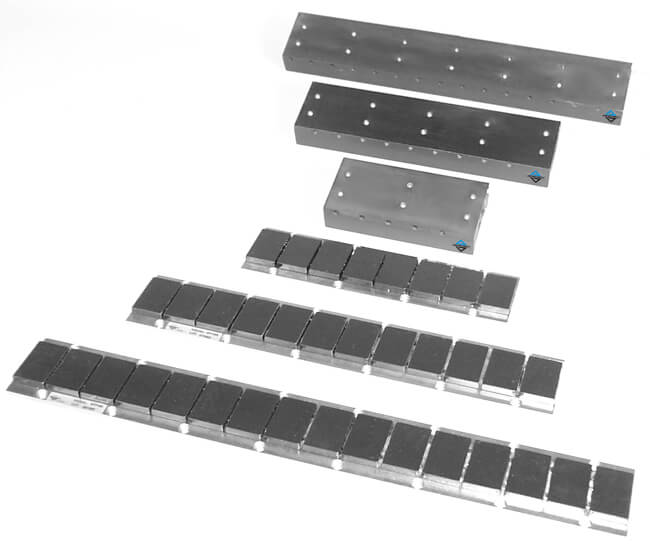
u型通道无铁直线电机

两个平行的磁铁轨道,在它们之间运行的无铁模板形成U沟道线性电机。器件设计必须具有轴承系统,以处理所需的负载并保持磁体轨道之间的蜗杆。可以将磁轨添加在一起,以便更长的行程。流离失所仅限于:
- 电缆管理
- 编码器长度
- 能够加工长,平,硬的结构
- 机器尺寸
- 轴承长度
与圆柱形动磁直线电机不同的是,u形通道直线电机设计用于减少漏磁。该力由线圈和环氧树脂制成,减少了质量,允许非常高的加速度,这对疲劳测试是有用的。该技术的关键优势是,由于无铁设计,没有齿槽力。这带来了以下优点:
- 在没有动力的情况下,可以手动移动强迫器
- 在任何速度下都不会遇到运动扰动
- 没有最小的力限制 - 可以应用非常小的力量
- 没有最小位移
- 自由设计用于指定使用的轴承系统
- 更高的准确性和重复性
- 没有吸引力的力量 - 需要比铁芯电机更低的成本轴承
- 由于没有吸引力而等于较低的轴承较少等于较低的所有权成本
该电机的缺点是:
- 成本与力比更高
- 可能需要机械制动器进行垂直操作
铁芯直线电机
这款电机系列具有带有单排磁铁的轨道,并且线圈安装在铁层压板上,以将通量聚焦到磁体上。电动机中的铁的存在放大力产生,但也会导致磁体和磁轨之间的吸引力。这引入了导致运动中误差的齿槽力。该电动机的另一个变型是插槽设计,其中将线圈绕组插入钢结构中以产生线圈组件。这也显着增加了力量输出以及齿槽效果。
使用铁芯直线电机的缺点是:
- 齿槽转矩,也称为“无电流”转矩,来自于磁力和力的铁芯。它在运动中造成干扰,在某些情况下产生很大的摩擦,阻碍小的移动。齿槽扭矩甚至可以观察到,当手动移动电机时,可能发生,试图防止小的力量,从应用到软测试材料。根据机械分析仪的频率范围和位移要求,齿槽转矩可能妨碍该电机的使用。
- 漏磁是指磁场缺乏包容性。这应该谨慎考虑,特别是如果其他组件或被测样品对磁场敏感。
根据最终应用,可以在需要高力时使用这些电机。尽管如此,齿槽将导致赋予UUT的运动的问题,因为它将增加或减去施加不正确的动作的力。然而,如果位移相对于电动机的杆间距非常小,则齿槽不会对行驶距离的运动产生显着影响 - 基本上齿槽力将是恒定值。但在这种情况下,控制器必须能够消除恒定的力干扰。此外,如果在机器中放入用于测试的不同尺寸UUT,则施加的常量齿槽力的量将是不同的,因为动态测试将在相对于电循环的不同位置发生。为了帮助减少这种现象,磁铁可能是倾斜的,但这不会完全防止齿槽。
声音线圈
音圈的工作原理与直线电机相同,但它只由一个线圈和两个磁铁(即一个电循环)组成。音圈易于控制,但提供有限的行程,并遭受功率下降,因为位移增加。音圈适用于不需要大振幅但需要高频率的应用,特别是DMA。电动激振器通常是基于音圈的系统。
压电执行器

压电驱动器利用压电晶体的物理特性。在这种情况下,施加在晶体上的电压会导致晶体膨胀,产生线性运动。这些驱动器是高度可靠的,适用于亚微米精度的应用在极高的频率。压电与电机技术相比昂贵。
伺服液压系统
这项技术多年来一直是该行业的主营。伺服液压需要非常高的力测试,如硬质材料或大型工业部件(例如,完整的飞机着陆齿轮),频率小于100 Hz。缺点是:
- 在低力水平测量的力扰动在运动逆转时特别明显
- 由于齿隙、迟滞和油对老化的敏感性,精度和重复性低
- 内部(软管,分销商,蓄电池等)和您的设备周围的极端空间预算(例如,库存,液压动力单元等流体桶)
- 高额拥有成本(例如,需要油替换和基础设施)
- 肮脏 - 每个液压系统都泄漏
无铁线性电动机的能力
这是DMA中使用的最新技术,提出了一些数据以突出这些电机的能力。图7至10示出了频率,速度,加速度和力输出的帕累托曲线。使用BLMX-502-B电机(见附录A中的数据表),可以实现超过1.0米的位移,在300Hz时为0.2 mm的位移。产生的最小和最大速度和加速度范围为0m / s至50米/秒,并且在低频下的低频下为39g,具有小的位移。单个电动机的连续力输出为1600n.线性电机的一个优点是它们可以将它们分组以产生更多力。例如,在一台机器中分组四个电动机产生6400 n的连续力,峰值为25,600 n。
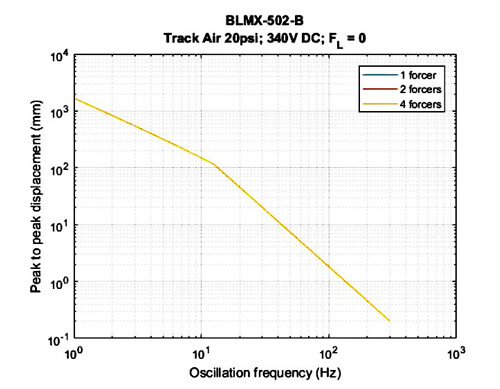
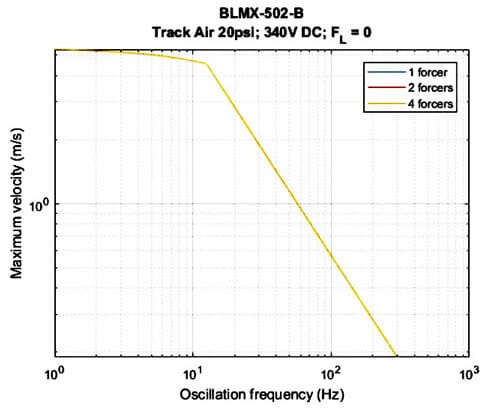
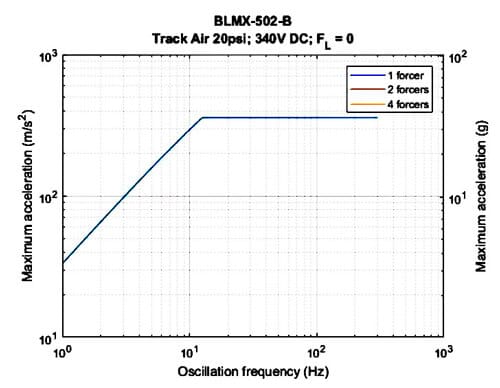
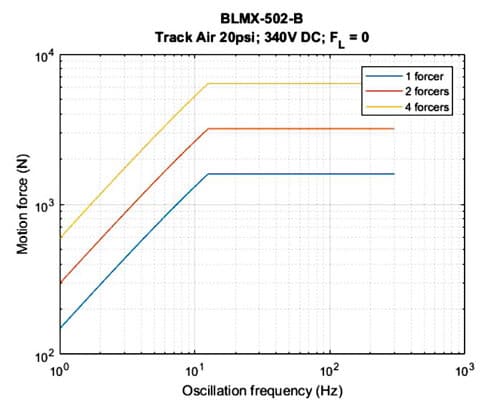
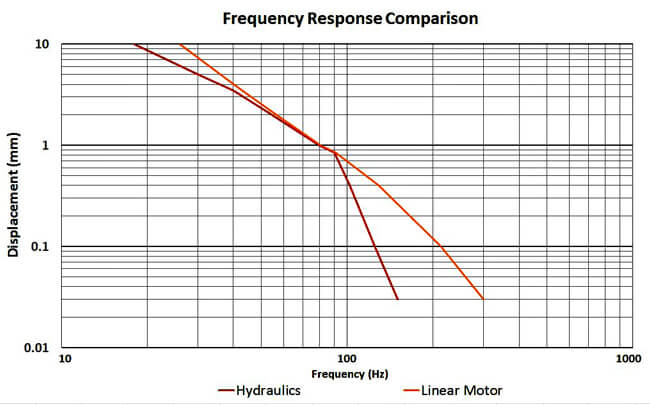
图10比较了伺服液压和线性电机解决方案的位移VS频率。新万博最新版本在中间频率(40 Hz至90 Hz)和位移(0.8mm至3mm)中,两种技术都产生了相同的运动。然而,在较高的频率下,线性电机技术在可以达到的频率下(低于1mm位移)。
伺服控制器的功能
线性电机需要伺服控制器。DMA机器的质量和性能受控制器和放大器选择的同样影响。选择控制器时,应考虑到控制律 - 通过包括前馈控制和干扰抑制,结构最小化跟踪误差吗?采样时间必须足够快,不仅仅用于伺服环路计算,而且必须用于放大器开关频率和线性电机的换向。为了产生高保真300 Hz振荡,轨迹必须具有足够的点,并且必须足够快地计算起作用命令。
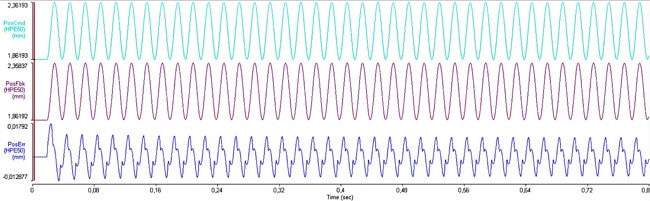
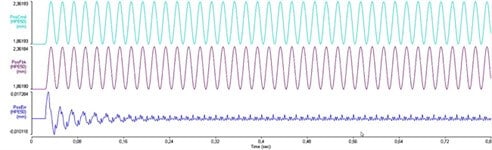
超越基础知识,控制器的算法有用于优化输出正弦曲线?例如,高级时变滤波器可用于消除运动中的不需要的谐波。使用谐波消除滤波器可以提供正弦波保真度的急剧改善,如图11和12所示。图12示出了使用谐波消除滤波器时的位置误差较小。这导致在所需频率下更高的保真正弦波。
在考虑频率范围的频率范围内,控制器的调谐能力也很重要。例如,测量机器的频率响应(BODE图)并能够循环凸形图以满足频率范围内的特定增益和相位标准,可以降低总谐波失真(THD),从而导致更高的保真正弦波在兴趣的频率。
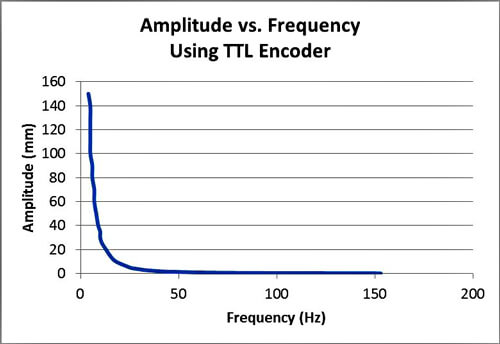
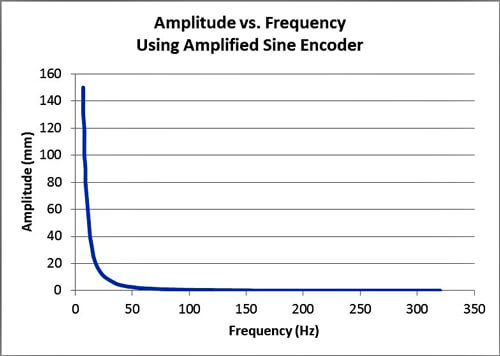
另一个控制器需要考虑的是可以使用的反馈设备的分辨率。两种常见的编码器是TTL和放大正弦(AS)编码器。经过乘法运算后,TTL的分辨率比AS编码器低。能够将AS信号倍增到非常精细的分辨率(如2纳米)的控制器将改善系统的控制,并允许达到更高的频率。新万博最新版本
图13使用带TTL编码器的直线电机,图14使用带AS编码器的相同系统(直线电机、轴承和控制器)。使用TTL编码器的系统可以产生高达152 Hz的运动,而使用AS编码器的系统可以产生高达318 Hz的高保真运动,这是TTL频率范围的两倍多。
对控制器的最后一次考虑是其实时从多个传感器收集数据。在力和位移(以及有时速度,加速度,温度)的相同采样时间处捕获的精确测量是对这些计算来表征UUT的关键输入。考虑的其他因素是解决测量,样本期,以及可以收集许多样本。
结论
新的DMA和测试机器正在快速采用线性电机技术,用于要求施加的力量10 kN和下方的新设计,同时不会将任何力波纹引入到从DC到1000Hz的频率的运动中。这些提供比伺服液压系统的“更环保”的设计,同时在竞争价格点提高机器性能和能力。在低力应用(≤10kN)中,可以达到比传统伺服液压机更好的THD频率。当高保真力轨迹和/或低分辨率力量应用是目标,无氧线性伺服电机是最佳选择。但是,这种性能不是使用线性伺服电机的结果。该技术必须与正确的反馈,控制(环路结构,算法和轨迹生成)和仪器相结合,以实现卓越的结果。了解更多有关这些技术及其在DMA和测试访问的申请或与我们联系+ 1-412-963-7470。
参考
1.图1中的数据基于Aerotech对闭环解决方案的市场研究。新万博最新版本