航空航天和国防,定制工程动作系统,数据存储,龙舌兰,万宝路和光学贴装,集成自动化系统,运动控制平台,精密制造,科学研究机构,半导体,白皮书新万博英超h
白皮书
谐波抵消算法实现精确运动控制新万博英超h
斯蒂芬拉德维克,博士。
机电研究总监
这内模原理控制理论指出,设计成完美拒绝输入信号的算法必须包含该输入的模型。
反馈控制正是遵循这一内部模型原理而发展起来的谐波消除算法更复杂的是重复控制器.
它们是如何有用的?
在精密运动控制应用中,周期扰动是常见的;新万博英超h任何振荡或旋转运动都会在主动运动轴和辅助运动轴上产生一些周期误差。谐波抵消算法,当适当应用时,给控制系统工程师提供了一个额外的工具,既有效又容易分析与常见的频域技术-消除跟踪误差在精密运动系统。它们适用于伺服指令或扰动很大程度上是周期性的——例如,在机床、数据存储系统和传感器测试中。
由于遵循内部模型原理的控制包含系统输入的模型,谐波消除算法包含周期性信号发生器。结合经过良好的传统控制器时,这些算法成为伺服系统设计人员的有用工具。
内部模型原则
控制理论的内部模型原则是一种粗略简单而且强大的概念。首先在20世纪70年代中期正式化,它要求算法包含任何输入信号的发电机(或型号),该发电机(或型号)要以相同为零的稳态误差跟踪。
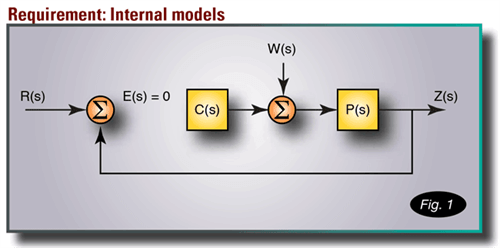
图1用方框图说明了这个概念。对于命令参考信号和测量信号之间的零误差,控制算法必须能够在没有任何进一步输入的情况下自动产生这个信号。
内部模型原理最常见的应用是在普通PID控制器中使用积分器I项。
考虑线性电机驱动的定位阶段,将其建模为一个自由质量,并对其施加控制力:比例和导数控制单独足以稳定系统,但任何恒定的干扰力(由于过程、重力、缆索等)需要在参考位置和测量位置之间有一些误差,这样类似弹簧的比例控制项才能产生输出。
恒定的干扰是用Laplace变换为1 / s的步进输入。添加该术语,积分器,到控制算法允许输出增加到取消干扰并且实现零稳态误差所需的恒定值。
重复控制器
反馈控制算法中存在周期信号发生器,满足内模型原理,并允许完美跟踪周期命令和完美抑制周期扰动。这些算法被称为重复控制,在20世纪80年代初首次定义,内部模型原理是这种“重复操作控制器”的基础。
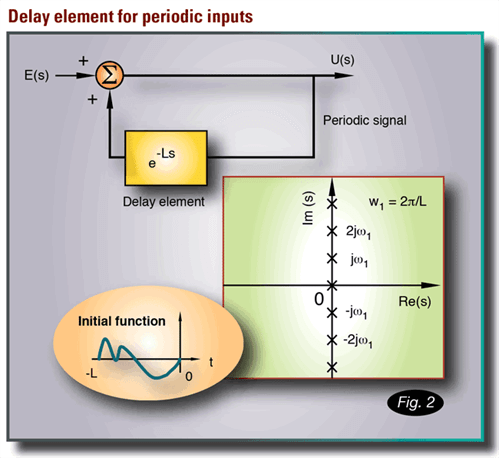
最初,开发人员在反馈回路中使用一个带有延迟元件的控制器来形成周期信号发生器。然而,在连续时域中,时滞元件对应的是一个具有无限个边际稳定极点的控制器。(参见图2)。
在时域中的任意急剧转换的信号需要高带宽信号发生器,能够产生该高频内容。稳定这些系统是具有挑战性的,因为高频控制器极倾向于在伺服机构的机械结构中与未拼模具或可变动态相互作用 - 导致不稳定。
对离散时间域重复控制算法的类似分析也显示出同样的问题。
经典的傅立叶级数分析阐明了时域重复序列与频域极点位置之间的关系。任何周期信号都可以同样很好地表示为简单振荡函数的总和-即正弦。
简而言之,重复控制器(当应用于线性系统时)可以被视为添加到控制算法中的一系列单频振荡器,以抵消本身是单频正弦信号总和的输入。
这种解释是有价值的,因为它允许使用熟悉的伯德图来确定这些系统的稳定裕度和稳态响应。
谐波消除
考虑重复控制的特殊情况,应用于有限数量的离散频率作为谐波抵消。这些情况在精密运动控制应用中很常见,包括:新万博英超h
- 力和扭矩波纹
- 旋转轴上的不平衡有效载荷
- 循环命令配置文件
- 螺杆导程和齿距
- 链接式电缆载波系统
请注意,一些干扰可以及时定期,而其他干扰是定期的位移 - 所以特定频率可以变化。
让我们假设我们在具有已知频率的恒定速度操作下具有一个系统。
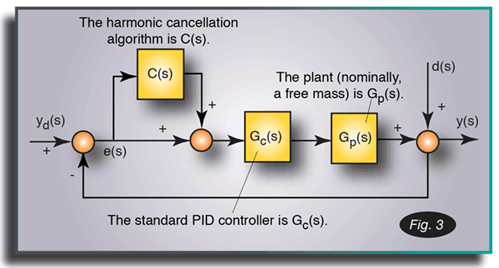
以“插件”风格实现谐波消除算法,可以根据需要轻松地启用和禁用它。(图3中的代表框图包括谐波抵消算法、标准PID控制器和被控对象。)根据内模原理,谐波抵消算法包含了并行振荡-每个频率包含一个扰动信号。
注意谐波取消算法通过查看单频干扰的情况,通过看频域中的效果。算法中的每个单独振荡器都有一个连续时间的拉普拉斯变换表示:
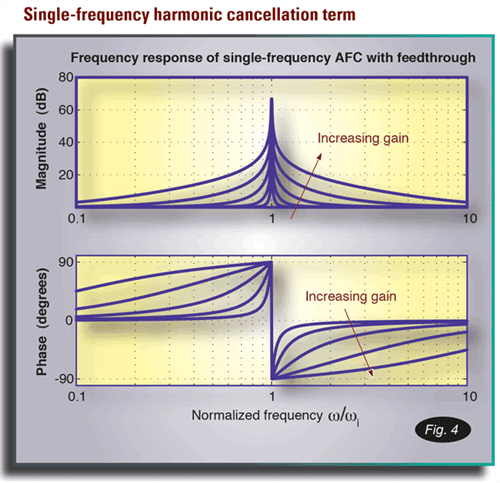
图。图4示出了谐波消除算法的频率响应图,因为增益术语从零(禁用振荡器)扫描到更高的值。注意:振荡器频率的幅度是无限的。
现在,回想一下熟悉的积分器项是如何为恒定干扰提供零稳态误差的。简而言之,我们可以简单地将谐波抵消块解释为非零频率的积分器。
扰动引起的跟踪误差在振荡器频率上等于零。参照图4的框图可以看出,计算扰动引起的跟踪误差为:
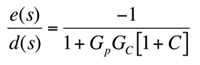
在振荡器频率处计算这个表达式:

在感兴趣的频率处,扰动的稳态误差为零。当目标是跟踪周期轮廓时,类似的分析显示命令和实际位置轮廓之间的统一响应为零相移。
总之,控制算法中的一个振荡器充当在特定振荡器频率的信号的“积分器”项。应用多个振荡器并行允许抵消更复杂的波形,并接近全面重复控制器的一般情况。这些被实现为“插件”控制器,保持标准PID控制增益不变。
当应用谐波抵消算法时,我们使用熟悉的频域调谐工具来确定稳定裕度(交叉频率、相位裕度和增益裕度)。
然而,一般来说,由于谐波抵消算法最活跃的频率范围非常有限,只要校正频率远低于系统交叉频率,这些系统就可以直接调谐。
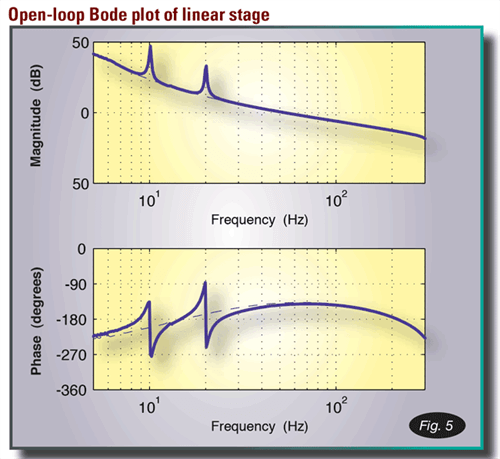
图。图5示出了具有主动谐波消除算法的系统的实际开环频率响应。优势峰值在系统交叉频率下方的环路增益中突出;然而,它们的效果是充分局部的 - 因此在交叉频率下的增益和相位相对不受影响。
应用实例
一旦理解,内部模型原理、重复控制和谐波消除的整体概念是广泛适用的。
示例1:考虑控制磁盘驱动器的读写臂。这些磁盘在完全真正的轴上没有旋转,但施加到误差运动的同步部分的重复控制可以提高头部跟踪运动的能力。
实施例2:在不对称转动操作中使用的快速工具伺服机构以及重复控制。当转动扭矩形状的表面时(例如用于校正散光的隐形眼镜的模具),切削刀具基本上返回到主轴的每个旋转的相同点。该周期性刀具路径可以用谐波消除振荡器分解成其傅里叶系列系数,其应用于这些中的每一个。
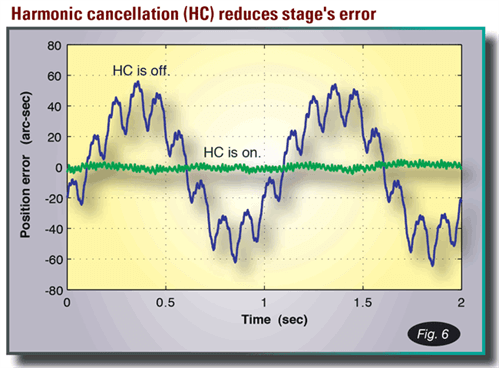
实施例3:一个简单的应用是具有水平安装旋转级的系统。从一种特定情况下的这种机器,设计者需要提高速度稳定性。每次革命的一个不平衡和每次革命的九个电机杆间距都是占主导地位的。(参见图6,其示出了在级以60 rpm旋转的同时测量的位置误差。)在这些频率下施加谐波消除算法从33到1.7 ARC-SEC-A 12×降低减少了从33到1.7的根部均线跟踪误差。