航空航天和国防,应用笔记,定制工程运动系统,电子,运动控制平台,电机,精密制造,科学研究机构,半导体,阶段和执行器,测试和检查新万博英超h
应用笔记
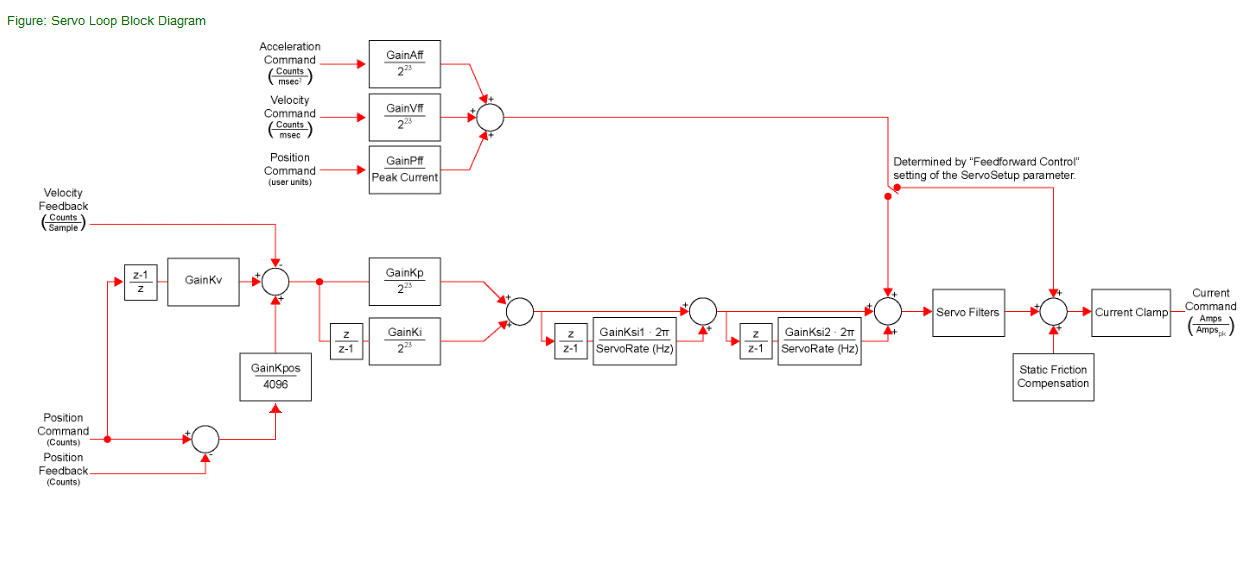
高带宽力控制
传统上,线性级与编码器一起使用,以定位到运动轮廓中的精确点。这些编码器用于定位,并且在无刷伺服电机的情况下,对于电动机换向。然而,在物料压键类似的某些应用中,位置并不像力那么重要。当将两种材料结合在一起时,如果位置是目标,则在粘合时施加的力可以显着变化。部分厚度,环氧树脂的量和阶段间隙可以组合以产生比完整和成功的粘合过程所需的更多或更小的力。如果可以使用力代替伺服回路电平的“位置”,我们可以确保在循环后施加相同的力量,无论部分公差如何,以产生更均匀和成功的粘合结果。
挑战
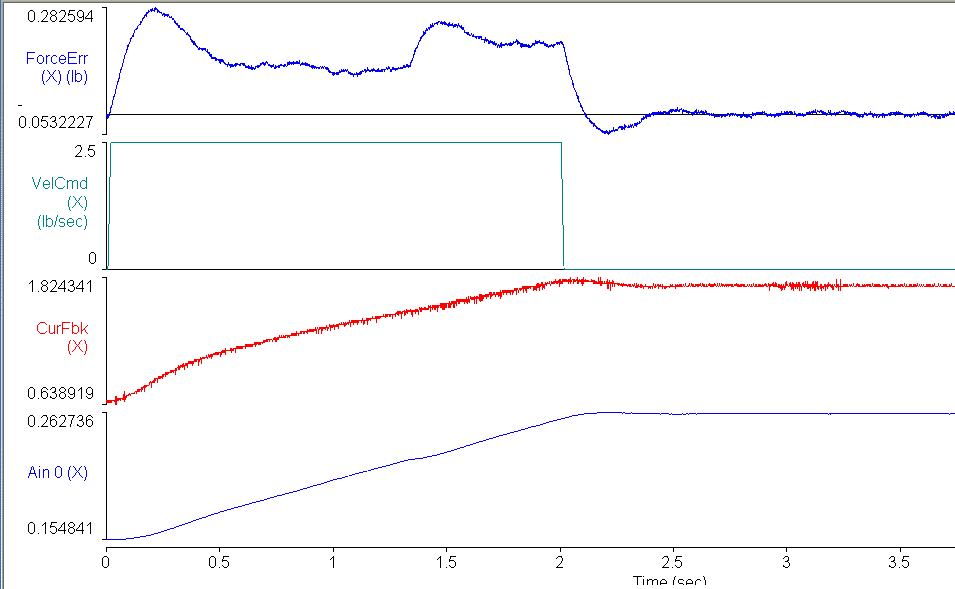
在下面的示例中,UUT可以在正常定位控制模式下移动到一些负载/卸载位置。当部分位于位置时,我们切换以强制控制到测试或处理本机。在力控制部分期间,需要精确的恒定力 - 或在某些情况下需要精确的不同力 - 完成该过程。我们希望这转变从位置到强制控制变得平滑,我们希望能够将力量编制,就像它是一个位置一样。
解决方案
实现力控制有两种基本方法:自动对焦循环和传统的PID循环。根据应用,可以比另一种更好。当需要的力回路带宽高时,使用的方法,传统的PID方法将在此描述。自动对焦方法通常具有约1/5的位置环带宽的带宽,这使得自动对焦方法在3 Hz至10 Hz带宽中更合适。
系统设置
系统以双循环模式运行。编码器用于速度环并换向电动机。力量计的输出用作定位编码器。Aerotech合奏控制器可以接受高达±10 V模拟信号。该信号由16位ADC读取,因此我们的分辨率为系统±32768计数。这些测试中使用的力量计输出±1 V信号,因此我们将在集合中看到的最大计数为±3276计数。
当负载/卸载操作需要不控制力并且需要简单的运动时,可以通过改变位置编码器读取速度编码器(线性编码器)以编程以编程方式返回单环模式。
相应测试中使用的设备包括:
- 合奏HPE10.
- 线性致动器(LMA-300)由具有1μm分辨率编码器的BLM-142线性电动机组成。
- 欧米茄51-50力量计
参数设置
需要设置以下参数(表1和2)以运行此系统:
| 范围 | 价值 | 解释 |
| PositionFeedbackChannel. | 0或1 | 值等于传感器连接的模拟输入数 |
| positionfeedbacktype. | 3. | 使用模拟输入作为反馈类型 |
| VelocityFeedBackChannel. | -1 | 默认通道;假设编码器插入反馈连接器 |
| VelocityFeedBackType. | 1或2 | 1对于Sques-Wave编码器和2用于正弦波编码器(带MXH / MXU选项) |
| GaInkv. | 0. | 设置为0以离婚,因为它们是不同的单位以来的位置和速度环 |
| countsperunit *** | 计算 | 32768 /峰值输出 |
| 故障掩模 | 需要为此模式取消选中反馈缩放故障位 |
| 范围 | 价值 | 解释 |
| PositionFeedbackChannel. | -1 | 值等于VelocityFeedBackChannel |
| positionfeedbacktype. | 1或2 | 值等于VelocityFeedBackType |
| VelocityFeedBackChannel. | -1 | 没有力量模式的变化 |
| VelocityFeedBackType. | 1或2 | 没有力量模式的变化 |
| GaInkv. | 1 | 只有一个编码器,速度和位置都是如此值为1 |
| countsperunit ** *** | 计算 | 分辨率的编码器/衡量单位 |
| 故障掩模 | 由于仅使用一个编码器,则反馈缩放故障位可以保持未选中 |
* Countsperunit基于Aerotech驱动器的ADC。对于16位模拟输入,范围为±10 V;-10 V等于ADC的0计数,+10V等于65536计数;0 V相当于32768计数。为此参数计算每磅每磅的ADC计数的数量。例如,在10V的峰值输出中可以测量高达350磅的称重传感器将具有32768/350 = 93.6229的计数每磅力。
** countsperunit基于分辨率和用户单位。对于具有0.25μm的分辨率和MM的度量编程单元的编码器,该参数的值为1 mm /.00025 mm分辨率= 4000 countsperunit。
*** CountSperunit更改不会生效,直到集合和独奏者控制器中执行重置之前。在这些示例中,这用于计算转换因子,以便可以适当地缩放运动命令,以便它以新单元编程,而是使用旧因子进行编程。
每个模式的调谐可以是不同的,并且可以基于力与位置控制来调整。需要单独计算每种模式的增益。自动调谐可用于设置位置控制。对于力控制自动调谐,也可以使用,或者手动步进响应可用于手动调谐和调整增益。
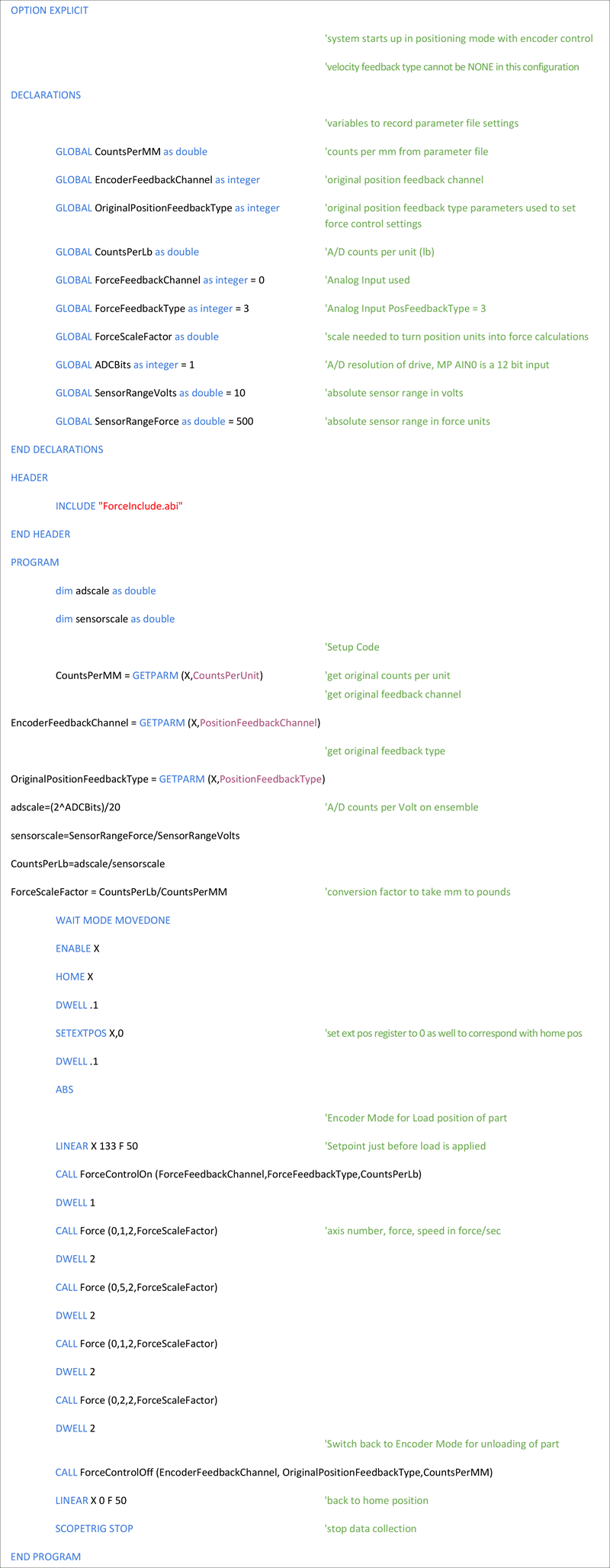
示例代码
在遵循的程序中,参数在位置模式设置中设置。此示例使用FORCECONTROL库。速度反馈类型不能在此配置中。
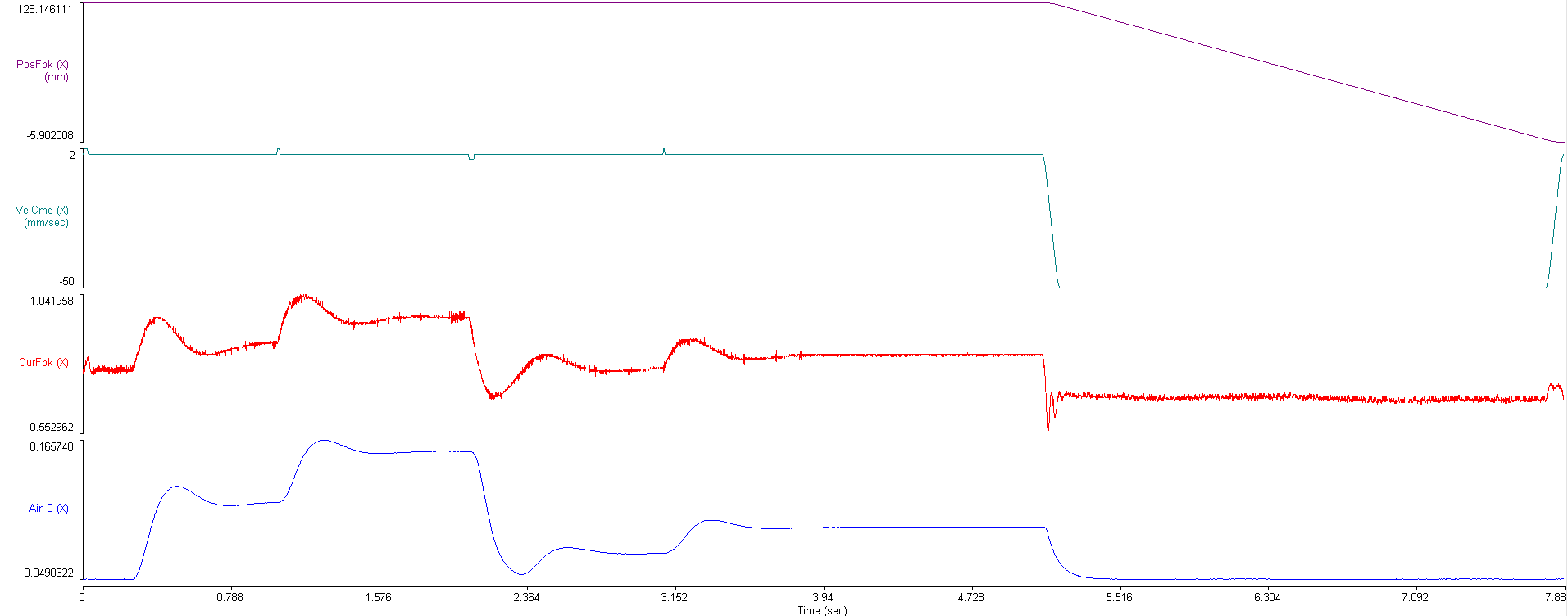
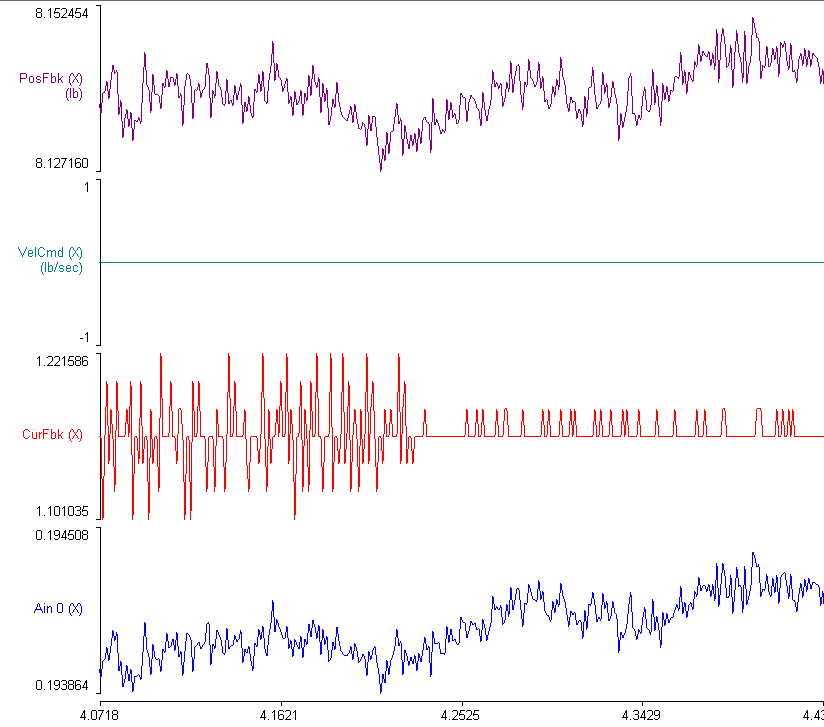
从图7中可以看出,模拟输入更改为644μV。每个广告数约为305μV,所以我们抖动大约两个计数。传感器的分辨率将决定您如何追踪给定的力量。
可以更改数字范围信号名称以反映用户单位。这允许曲线更好地代表实际测量的实际测量,而不是始终处于伏特和位置单元而言。