3D计量系统、航空航天与国防、定制工程运动系统、数据存储、电子、集成自动化系统、运动控制平台、光学与光子学、精密制造、科研机构、半导体、舞台与驱动器、测试与检验、白皮书新万博英超h
白皮书
提高自动化性能
马特戴维斯
计量应用支持工程师
在某种程度上,自动化硬件不可避免地会过时。很难确切地知道何时进行改造或重新设计,但有一些迹象不容忽视。很简单,当系统的容差和吞吐量不能再满足市场需求时,就该升级了。如果上一代系统的公差只能达到千分之一英寸,而市场要求万分之一,那么就需要升级。当机器的吞吐量由于更高的公差或高故障率而受到影响时,将需要升级。在这两种情况下,所使用的伺服驱动技术将对新系统的成功产生重大影响。伺服驱动为无法进行人机交互的地方提供运动。必须仔细选择这种驱动技术,以确保自动化过程执行预期的操作。它甚至可以选择伺服硬件,以增加性能值,使价格不那么关心。在当今的市场中,随着技术的突飞猛进,这种升级周期似乎发生得越来越快。
每个人对下一代产品的目标都是调整市场的性能要求和价格点。作为一个项目经理,你必须在你的工程师想要使用一种已经被证明和已知(但可能已经过时)的技术和你的营销人员想要包含来自市场的最新进展(可能还没有被广泛接受)之间做出选择。您必须明智地选择组件,同时减少使用新的和未经测试的技术的风险。当重新设计一个成功的机器时,你是在建立一个坚实的基础。所做的所有更改都应该提高性能、功能或易用性。您永远不会重新设计一个更慢、更难使用、功能更少的系统。
在Aerotech,我们在设计下一代伺服驱动器x系列时遵循了同样的方法。我们建立在一个技术,能够运行多个电动机类型(刷、无刷和步进)从同一驱动只有参数变化,驱动,20个数字和模拟I / O 4分,和接受多个编码器的驱动轴,我们改进它。我们采用了一种已经可靠的产品,并通过创造一种速度更快、不受电子干扰的总线使其更加可靠。我们采取了一个驱动器,有较低的位置抖动,使其更低。我们采用了一个驱动器,有很高的编码器采样率,使他们更快。在下面的部分中,我们将讨论为什么要做这些更改,以及如何利用这些更改通过使用经过测试和验证的技术来提高系统的性能。
通信故障
当网络瘫痪或工业工作场所的“小故障”时,停机时间和生产力的损失肯定会接踵而至,这将导致客户不满和利润减少。然而,伺服驱动通信硬件可以选择减少潜在的连接问题。
尽管无线技术在过去的20年里取得了长足的进步,但在工业运动控制方面,硬连线仍然是人们所期望的。新万博英超h以太网连接是工业通信的黄金标准。然而,这些铜电缆也为噪音提供了途径。电磁干扰(EMI)总是会导致铜连接上的驱动间通信问题,因为代表通信包的低电平电子信号可能会被损坏。消除电磁干扰的传统方法是采用良好的接地措施,并添加线路滤波器、电容器、金属屏蔽和电感来减少噪声峰值。在运动控制新万博英超h环境与大型电机,放大器和I/O,有许多噪声源需要解决。这些额外的组件和布线不仅增加了材料成本,而且还增加了大量的工程和劳动力成本,因为所有这些组件都需要设计到机器中,并手工安装。此外,由于一些噪声源只在工厂车间,这些噪声源直到机器在终端用户设施中调试时才被发现,这总是问题首先出现的糟糕地方。
尽管无线技术在过去的20年里取得了长足的进步,但在工业运动控制方面,硬连线仍然是人们所期望的。新万博英超h以太网连接是工业通信的黄金标准。然而,这些铜电缆也为噪音提供了途径。电磁干扰(EMI)总是会导致铜连接上的驱动间通信问题,因为代表通信包的低电平电子信号可能会被损坏。消除电磁干扰的传统方法是采用良好的接地措施,并添加线路滤波器、电容器、金属屏蔽和电感来减少噪声峰值。在运动控制新万博英超h环境与大型电机,放大器和I/O,有许多噪声源需要解决。这些额外的组件和布线不仅增加了材料成本,而且还增加了大量的工程和劳动力成本,因为所有这些组件都需要设计到机器中,并手工安装。此外,由于一些噪声源只在工厂车间,这些噪声源直到机器在终端用户设施中调试时才被发现,这总是问题首先出现的糟糕地方。
通过光纤连接,驱动器之间的距离可以延长,而无需担心沿电缆运行的电磁干扰敏感性增加。传输距离可以显著增加(驱动器之间的传输距离为100米,而驱动器之间的传输距离小于10米),允许遍布机器或工厂车间的分布式面板,无需将所有电机电源和反馈电缆运行回一个集中位置。保持电机电缆运行更短的电缆成本,也需要精心制作电缆托盘和通过地板或天花板运行。因此,驱动器可以更接近移动的硬件,而远离控制PC。随着控制通信可靠性的提高和布线电缆的放置变得更容易,您的机器受益于减少停机时间和更容易安装。这建立在分布式I/O成熟技术的基础上,并将其应用于电机和驱动器。
工具提示抖动和模糊的图像
不受控制的和不必要的运动可以导致任何过程的破坏。在拍摄图像时,切割工具的跳动会导致波形切割或相机抖动,从而导致图像模糊,这将影响系统的吞吐量并导致低于标准的输出。通常补偿这种类型的运动的方法是降低速度和加速度,这将影响吞吐量。如果我们能够保持高吞吐量和高产量,这将使您的系统具有优势。
这种不需要的运动的水平称为噪声层。噪声层是系统中干扰的环境水平。当测量特性时,必须能够观察噪声,了解它如何影响你的测量,以及测量的精确性。它总是最好看噪音地板与无伺服活动。这给出了自然振动和伺服诱导振动的对比图。
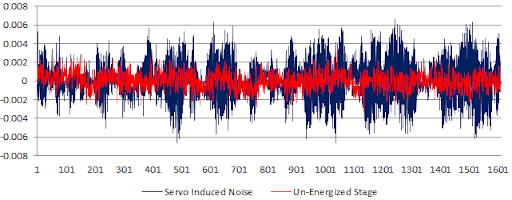
噪音的地板是受抖动在运动系统的影响,一楼的振动,并驱动抖动,以列举一些更常见的罪魁祸首。伺服回路用于校正定位中的任何误差,空气隔离系统用于最小化底层振动,电流回路控制用于最小化驱动引起的抖动。Aerotech的x驱动器解决了三种振动源中的两种。
为了实现一个更低的噪声底板,你可以增加电流回路分辨率,这给了更小的电流台阶的能力,并增加伺服回路速率,这将“看到”这个振动更快,并能够更快地补偿它。我们最新的驱动硬件实现了这两个功能,我们已经看到噪音地板的减少2到4倍比老的驱动技术。当零件在原位时进行测量或触发操作时,这种位置稳定性是至关重要的。
由于新的伺服硬件具有2-4倍的低噪声,它可能远离更昂贵的基于线性放大器的驱动硬件和使用经济的脉宽调制(PWM)硬件。对于过去需要低效率、昂贵和笨重线性放大器的应用,PWM放大器现在可能成为一种可能性。这样可以减少橱柜空间,降低成品机器的成本。PWM驱动器比线性的同类产品便宜40%,整体体积和重量小四分之一以上。PWM驱动比线性驱动产生更少的热量,可以在更高的额定功率下运行。线性驱动器纯粹用于位置要求,PWM x驱动器是一个经济的选择和真正的升级。这是真正意义上的双赢,以更低的成本获得更好的性能。
模拟噪声和数据速率瓶颈
大多数定位系统需要某种类型的反馈来准确感知系统的位置。控制系统使用这个信息来产生一个错误信号。控制回路根据这个信号作出决定,以便它可以补偿这个错误。通常会为此目的选择编码器。增量编码器通常有两种形式——数字或模拟。自从20世纪80年代第一张cd发行以来,模拟与数字的争论就一直在进行。对信号进行数字化去掉了保真度,得到了一个真正的正弦并把它变成了一个阶梯。光编码器仍然是模拟的,但这个信号在编码器电子或在驱动端被数字化。接收模拟反馈信号的驱动器最终将这些信号在内部数字化。这些模拟信号上的插值值越高,就越接近纯正弦信号。
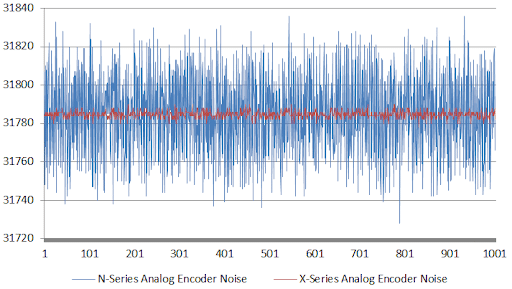
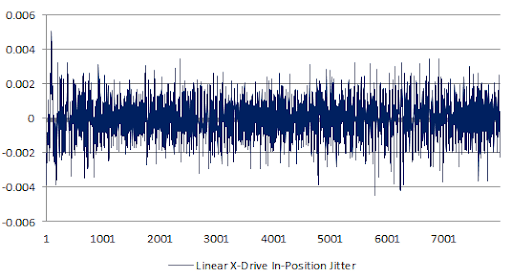
与前面提到的噪声底相同,模拟编码器信号本身也有噪声底。为了减少这种噪声,使用了滤波技术。模拟编码器的采样频率越高,驱动电子器件就越容易过采样和过滤信号以消除噪声。图3显示了这种增加的采样率的结果。由于这种噪声与位置抖动直接相关,我们可以看到比旧驱动器改进了100X !
这种更高的采样率的另一个好处是速度的提高。一个驱动器每秒只能读取这么多的计数——采样率越高,每秒可以读取的计数就越多。编码器制造商每年都会推出受驱动器最大输入速率影响的更精细的螺距尺度。从40µm节距规模移动到4µm节距规模,如果驱动器没有升级以更快地读取这些规模,将导致潜在的最大定位速度降低10倍。与前辈相比,x系列驱动器有4X的编码器输入率。
由于更高的性能总是一个新设计的目标,利用模拟编码器与x驱动器创建一个环境,您可以利用一个强大的控制包,以最大限度地减少听觉噪音和速度稳定性。
结论
让设计阶段成为您寻找合作伙伴的机会,谁愿意与您一起工作,以获得最大的新机器。选择错误的伺服驱动器可能会限制机器的整体性能。改进的通信可靠性、定位精度和内置在可靠、健壮和性能增强的驱动技术中的编码器采样,是在设计将推动公司未来增长的下一个系统时的安全选择。