航空航天和国防,定制的操作动作系统,电子设备,功能概述,龙舌兰,综合自动化系统,激光扫描头,激光系统,医疗器械制造,运动控制平台,电机,精密制造,阶段和执行器新万博英超h
特征概述
无限视野(ifov)用激光扫描仪同步线性或旋转伺服轴
设计特点
- 易于使用的设置参数和在每个配置文件上轻松执行
- 一个控制器的实时同时轨迹生成
- 扫描仪伺服级跟踪的自动动态纠错
- 支持使用诸如位置同步输出和模拟矢量跟踪等先进激光控制功能
- 优化与Aerotech的CADFusion包的组合运动路径执行顺序
- 设计用于Aerotech AGV Galvo扫描仪;兼容XY2-100驱动的第三方扫描仪
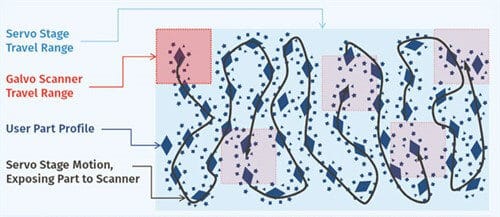
Aerotech的无限视野(IFOV)是一种独特的行业领先的解决方案,用于使用激光扫描仪同步线性或旋转伺服轴。IFOV产生显着的吞吐量改进,并消除了由于重叠和错配的激光加工而拼接误差和部分质量问题。通过将GALVO扫描仪与伺服级的旅行范围的高动态功能相结合,可以连续处理显着大于扫描仪传统视野的零件,无需将各个工作区域缝合在一起。
无限的视野提高了加工质量以及大零件的吞吐量。IFOV不仅扩展了任何GALVO系统的工作区域,而不是单独使用光学器件,而且它还通过扩展FOV来消除激光光斑尺寸和可用工作区域之间的权衡。结果,用户能够在不影响工作区域的情况下选择作业的最佳视镜配置,因此消除了对受损解决方案的需求。
毫不费力的操作
如果没有用户调整不同运动路径的参数和设置,则为每次工作。这是因为Ifov使用单个控制器处理用户所需的2D配置文件并将其转换为实时将其转换为相对伺服级和扫描仪运动。如果ifov考虑了扫描仪的可用工作区域,以确保其命令的轨迹停留在其视野中。它还考虑了伺服和扫描仪轴的加速度和电流限制,以便指挥的运动不会导致任一轴上的故障条件。一直,组合运动精确地维护用户规定的刀具路径。
更好的准确性和吞吐量
IFOV还导致吞吐量改进以及对类似解决方案的准确性改进。新万博最新版本由于Ifov使用统一的开放控制架构,因为它在控制器上共享实际反馈信息,并使其可用。结果,扫描仪的运动包括伺服轴的动态跟踪误差作为其轨迹的一部分,并实时纠正它。这意味着用户通过整个部分获得扫描仪级动态跟踪性能,无论使用组合运动如何。这也意味着伺服级可以更快,更积极地推动,而不会影响成品部分的整体精度和质量。
兼容高级激光控制功能
驱动器之间的集成反馈通信允许创建和使用基于实际工具的零件位置和激光斑点的速度的激光控制特征。该特征作为Aerotech的位置同步输出(PSO)和模拟矢量跟踪功能允许用户作为刀具位置的函数将激光器发射,并根据刀具速度调制激光器的功率。
CADFUSUT结合路径优化
使用组合伺服级和扫描仪运动系统执行运动配置文件时,优化部分功能的执行顺序对于获取IFOV解决方案的所有优势至关重要。Aerotech的CADFusion 2D CAD / CAM软件包具有内置优化参数,允许用户为任何系统规划最有效的功能执行顺序的运动路径。它还使用户能够影响IFOV算法如何在两个子系统之间分离完整运动配置文件的能力,并优化专门用于组合扫描仪和伺服级运动的路径。CADfusion提供了用户创建,编辑,孵化,优化和将任何向基于向量的CAD数据转换为Aerotech可执行的G代码运动命令的能力。
适用于所有Aerotech AGV产品和XY2-100驱动扫描仪
IFOV集成控制器功能适用于所有Aerotech的AGV系列Galvo-Scanner的产品。利益的实现源于单个控制器和控制架构,命令两个运动子系统。但是,可以使用Aerotech控件,并利用IFOV控制器功能,其中包含第三方阶段和接受XY2-100命令通信的扫描仪。在使用Aerotech的A3200控制器的第三方设备的实施中,扫描仪的伺服环路在第三方自己的驱动器硬件中自包含,而不打开到A3200控制器以进行审讯。因此,用户跨越一个控制器丢失反馈集成的益处。这意味着没有校正伺服阶段动态误差,并且激光斑的真实工具的零件位置和速度是未知的。其他丢失的益处是增值加入激光控制功能,如位置同步输出和模拟矢量跟踪。这些缺点也被发现在竞争解决方案中,其中不同的独立控制器集成在一起。新万博最新版本单独生成伺服和扫描仪轨迹,同时尝试在不同控制器跨不同的控制器同步命令永远不会工作以及垂直集成的解决方案。
还看看我们的宣传册,用Aerotech的无限视野毫不犹豫地结合了Galvo Scanner&Servo Systems的运动。