自定义工程动作系统,六脚踏,综合自动化系统,运动控制平台,光学和光子,压电纳米定位器,精密制造,特定产品,科学研究机构,阶段和执行器,测试和检查,白皮新万博英超h书
白皮书
通过选择正确的定位架构来最大化光学对准精度
RJ HARDT
3D计量系统总监
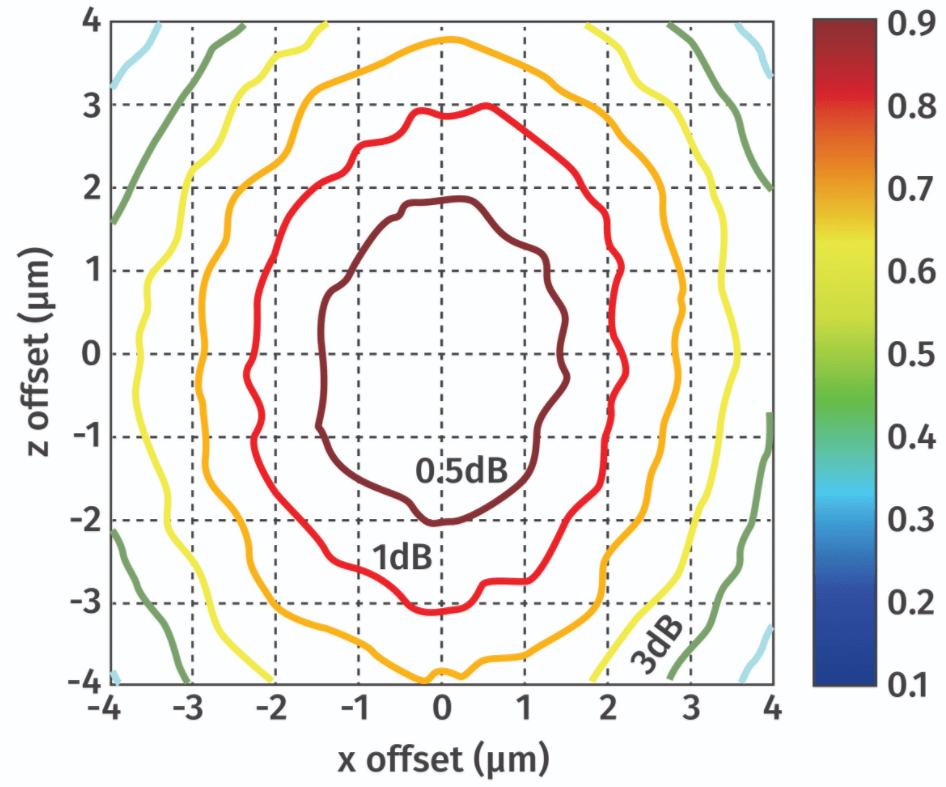
硅光子和微光学技术的进步是将自动对准公差驱动到纳米水平。当今光子器件中光学元件之间的错位直接影响光传输的质量,并且只有几微米的未对准可能导致最终的设备功率损耗为50%或更多(图1)。光子器件制造商正在冲动开发新的对准技术和硬件,以跟上光学元件之间的空间公差要求。通过实现最佳定位系统架构,可以在自动对准过程期间控制这些空间公差。
有两种类型的架构:串行运动学和并行运动学。两者都有不同的空间配置,编程和所需的硬件,选择理想的架构可能是具有挑战性的。跟踪架构的准则在架构上提供可用的架构以及何时实施。
架构选择 - 串行与并行运动学
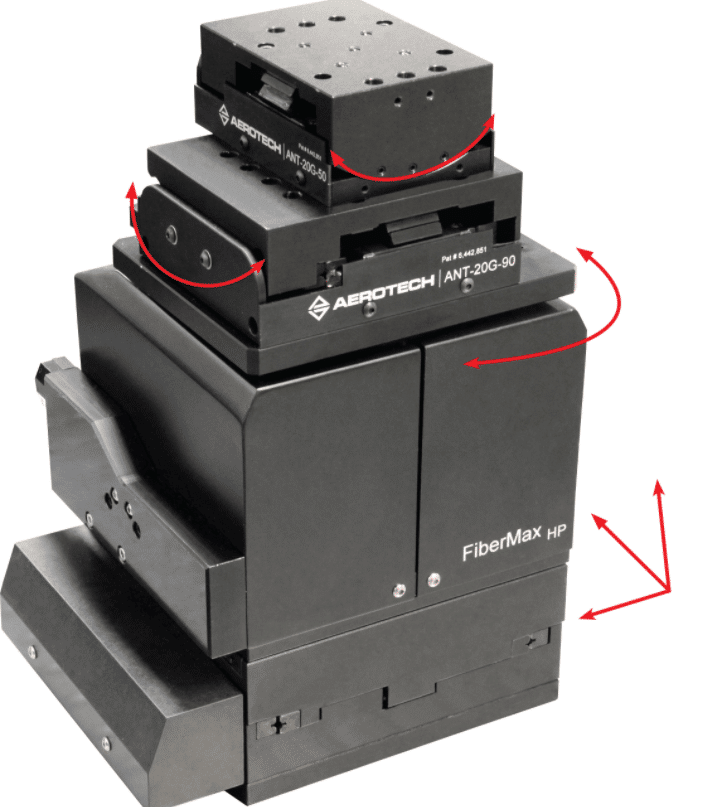
连续定位架构使用单个执行器在空间中的一个方向上定位光学部件。串行系统可以堆叠在一起,以实现所有六个三维空间(三个线性和三个旋转)的定位要求。并行定位架构使用多个致动器将光学部件定位在空间中的一个或多个方向上。它们也可以配置为在所有六个三维空间中实现定位要求。有关每个运动方法的硬件示例,请参见图2。

每个架构使用户能够在三维空间中进行编程。另外,每个允许选择和编程可以执行旋转的空间中的点。这对于将组件阵列(例如多个输入纤维的纤维块对准,这对于具有多个波导的芯片,是有用的。在两个运动方法之间可实现的精度方面存在局限性,特别是在执行对准过程的兴趣点。
串行架构的情况
通常,通过串行设计可以实现最高级别的对准精度,因为串行系统提供以下内容:
- 保持对齐的组件的工作点处更好的位置准确性
- 每个运动方向的较小增量步骤尺寸
- 返回以前的位置时更好的可重复性
串行系统表现出这些优点,因为它们限制了在任何给定时间移动的执行器的数量。例如,在图2中所示的并行六角摄像机中,所有六个致动器同时移动以在单个运动方向上移动有效载荷。这意味着来自各个致动器的误差运动复合。串行系统简化了运动要求,因为每个轴独立于其他轴移动,并且只在需要时移动。这允许串行系统与较少运动引起的误差对准光学组件。
此外,并行运动系统所需的关节由于机械顺应性而增加了与运动相关的错误。序列化运动消除了这些附加接头,并导致能够单独运动的连续装置,或者步进尺寸小于10纳米,同时提供数百毫米的行进。这款长途旅行对于辅助工艺非常有用,如部件加载和刀具更换。
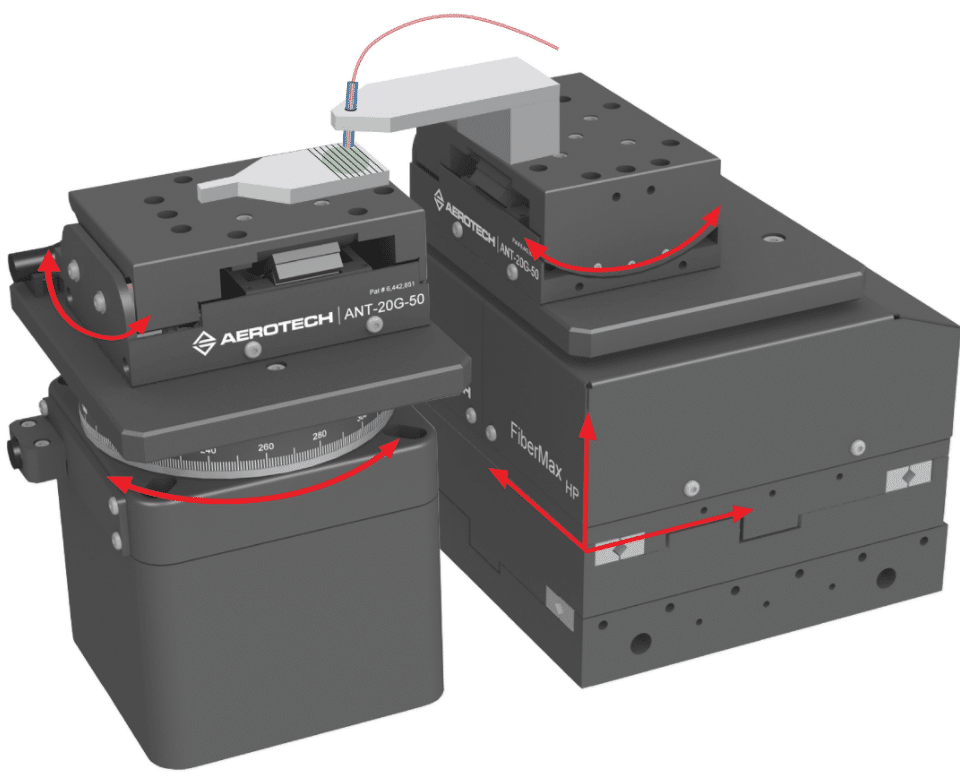
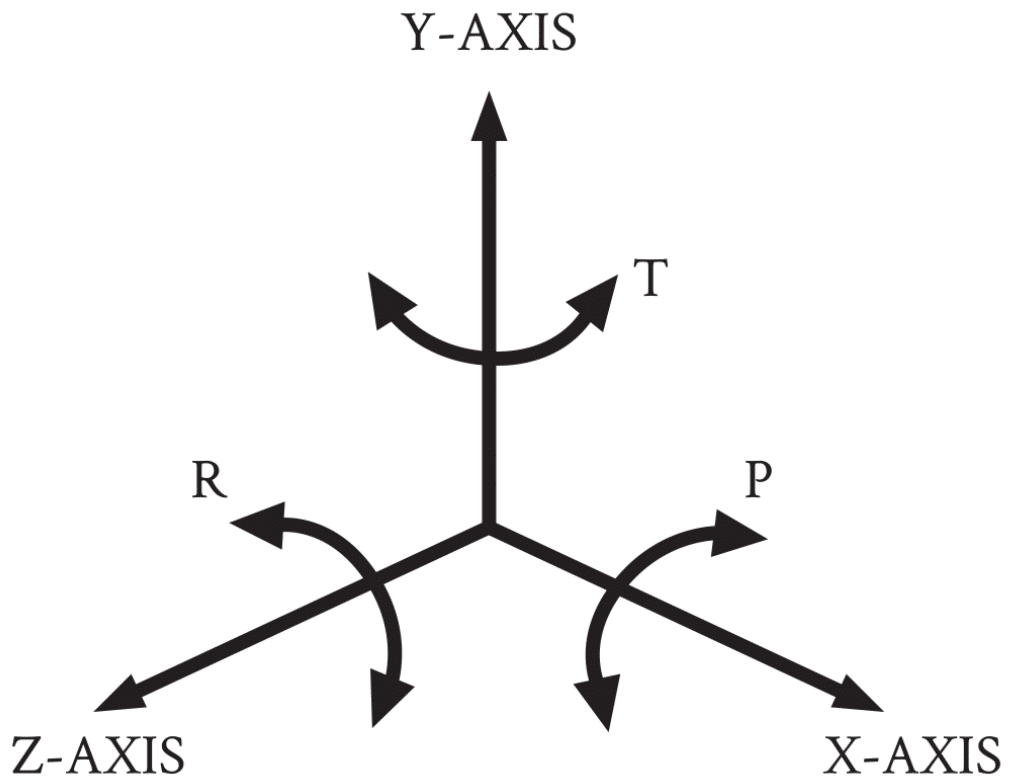
串行平台的其他显着优点是设计模块化和简化的编程。如图3所示,可以分离轴,降低工作高度,同时允许用户以六个自由度进行编程。由于需要在致动器之间的机械连接,这种灵活性通常与并行运动系统丢失。另外,并行 - 运动致动器之间的连接需要将变换代码写入运动控制器,使得用户可以在熟悉的坐标(例如,笛卡尔空间)中编程。新万博英超h这些转换使得简单的操作,例如查找每个轴的主页引用非常复杂。串行架构消除了对这些更复杂的变换的需求。
平行运动架构的情况
平行运动设计通常无法达到串行设计的定位精度。但是,在某些情况下,它们更适合使用。主要是,如果对准站的物理占地面积是关注的,或者如果有有限的空间添加运动控制,则并行运动方法可以提供帮助。新万博英超h致动器不必像串行系统一样彼此堆叠,并且可以彼此更靠近。这意味着运动系统的占地面积可以在垂直方向上减小到50%。平行架构的另一个优点是在需要改善刚度和刚性的情况下放置致动器的自由度。如果设计正确,多个执行器可以同时共享有效载荷的负担。这允许用户在组件粘合到位时,用户可以在不担心位置稳定性的情况下定位较重有效载荷。
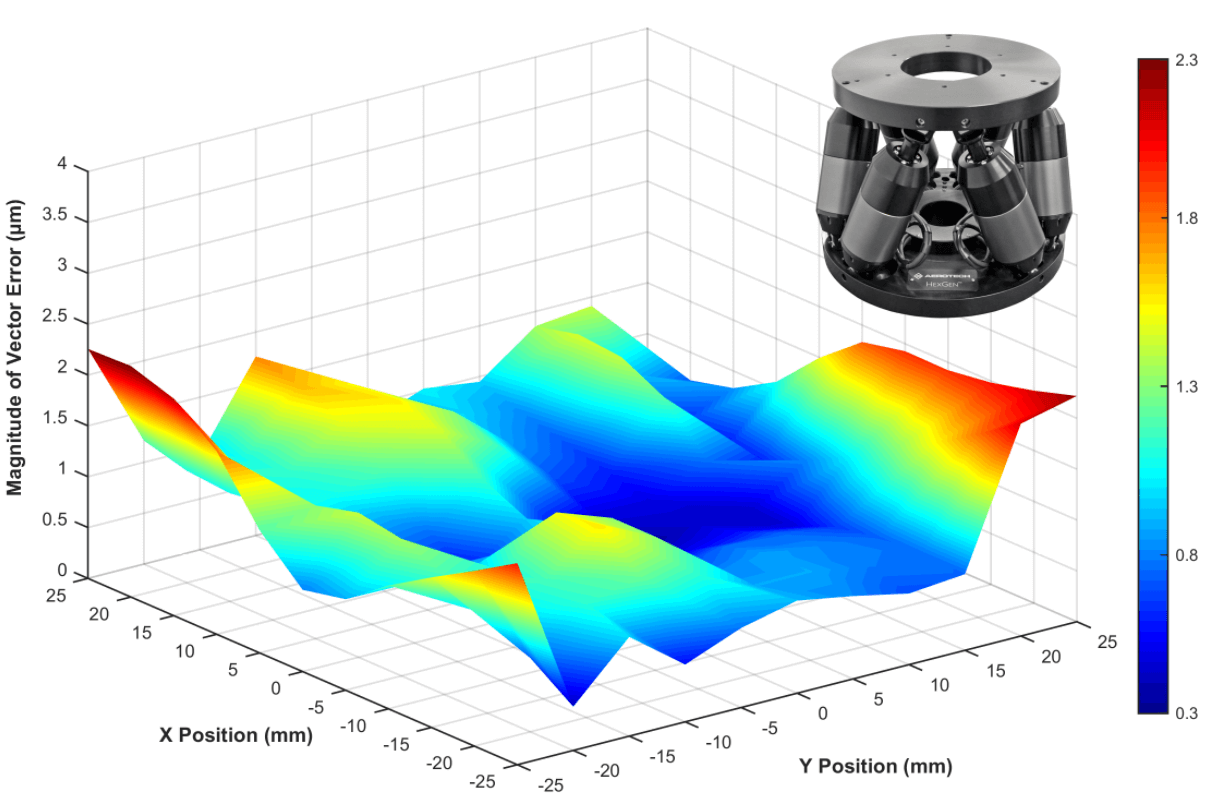
虽然六角峰通常以其高精度而闻名,但是Aerotech开发了平行 - 运动设计,其具有与串行运动溶液相当的定位性能。新万博最新版本图4示出了在XY平面中移动时六角形的3D矢量定位精度。通过使用高精度,强大的力学和先进的控制/校准策略来实现这种性能。
组合方法的情况
由于每个定位架构对光学对准系统具有独特的益处,因此将它们组合在适当的情况下最有意义。使用串行架构进行高精度过程和并行架构,用于减少平台占地面积,增加负载容量将最大限度地提高总对准过程的性能。选择一个自动化供应商是很重要的,可以在单个包中轻松地组合串行和并行架构。这使设计人员更具硬件工具来实现,并提供编程器一个平台,可以开发应用程序软件。

Aerotech提供串行和平行运动的对准解决方案。新万博最新版本我们的控制系统是架构 - 不可知论,因此我们可以根据应用要求实现适当的解决方案(参见图5)。应用这种方法允许用户最大化任何光学对准过程的精度和功能。
案例研究:组合对齐系统
由于自动化光子对准机的不成熟工业供应链,这些机器的用户通常根据所对准的光学元件来要求专用平台。此马刺灵活性,并允许机器构建器选择适合应用程序确切需求的自动化和定位系统。已经使用这种灵活性的一种情况是将半导体激光源对准微透镜,然后将半导体激光源对准,然后在光子集成电路上进行集成波导。在这种情况下,有多个组件需要同时彼此对准,以便将足够量的光传输到光子集成芯片中。这些光子元件中的每一个都需要相对于彼此的多个小位置转换,并且由于有限的可访问工作体积,它们也需要在空间受限环境中翻译。为了进一步使机器设计复杂化,需要高速自动零件加载步骤。
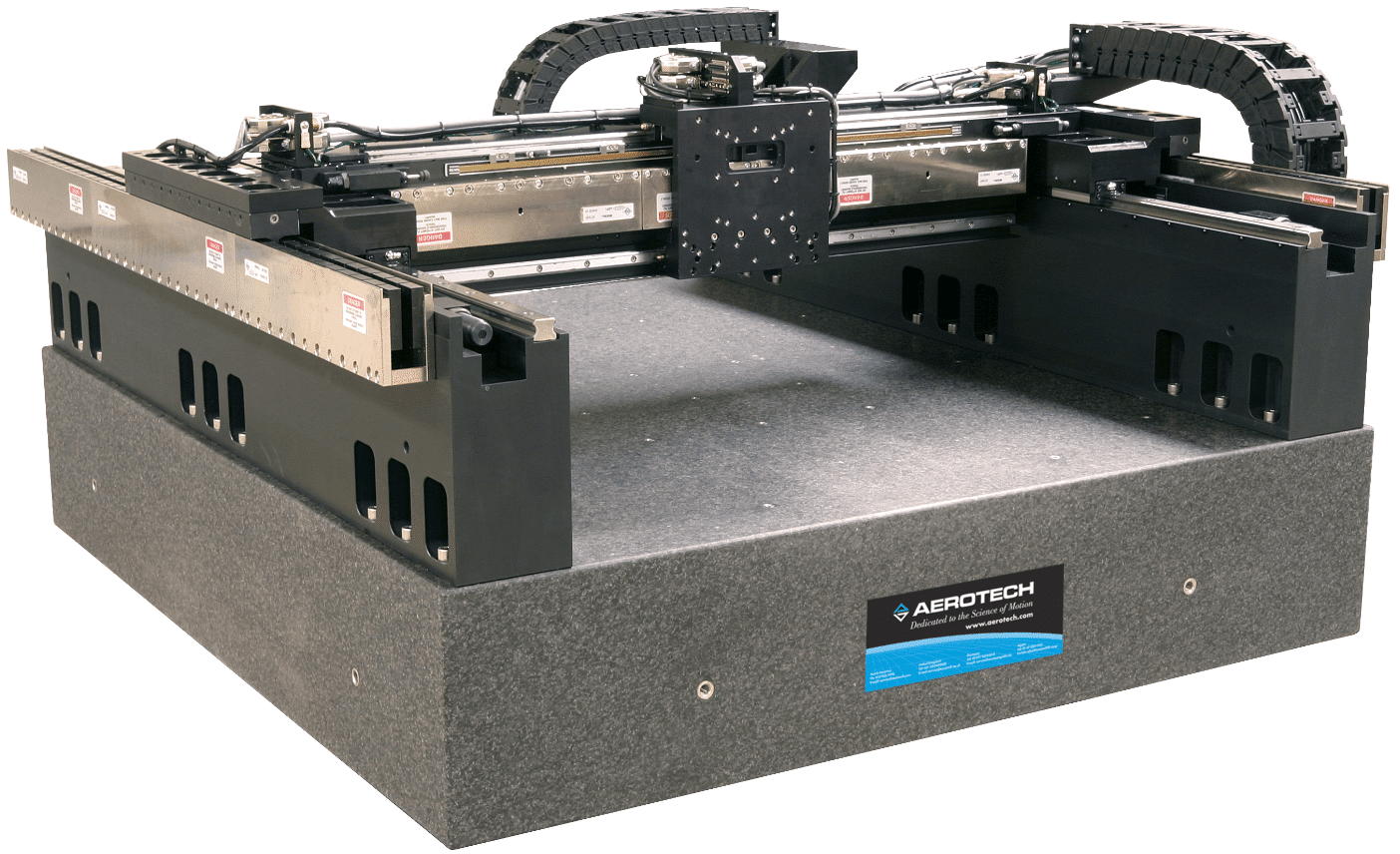
组合的串行和并行运动学定位系统用于解决此应用所呈现的多个变量和约束。为光学组件的装载和卸载实施了高速架空龙门平台(图6)。其吞吐量取决于减少和僵硬的有效载荷,因此在龙门的移动托架和部件夹紧工具之间加入了平行运动六个自由六角摄取。最后,为了使激光,透镜和波导之间的最高可能的光传输,将高精度串行架构系统放置在顶部龙门机下方的基座上。将该串行系统分成两个模块,以允许光子集成芯片和激光源独立移动。这也在激光源和芯片之间提供足够的工作体积,用于并联运动六角己端以操纵微透镜的最佳位置。最终,所有组件都可以同时对准亚100纳米精度,其允许减少提供给光子芯片的传输光损失。
总的来说,该系统是为需要对齐的特定组件而设计和专用的。灵活性允许设计团队选择可用的最佳定位架构。机器建成后,与两个单独的连续定位系统和龙门龙同时控制和编程并行运动六角摄像头的能力具有很大的好处。此功能允许设计和实施团队来降低控制系统和软件开发时间表的复杂性,最终将产品提升到市场。在构建自动光学对准站时,应考虑串行和并联定位架构以便利用其各个优势。