定制工程运动系统,龙门,框架和光学支架,六足,运动控制平台,压电纳米定位器,科学研究机构,舞台和驱动器,白皮书新万博英超h
白皮书
最小增量运动和保持稳定的束线定位
布莱恩·奥康纳
产品经理
背景
许多光束线应用,如x射线显微镜和计算机断层扫描(CT),需要定位样品,探测器和光学,以执行测量。显微技术的应用通常需要在亚微米甚至纳米级对物质结构进行成像。由于在测量过程中,样品或光学器件的移动会导致不良的图像,因此需要良好的短期和长期的保持稳定性。此外,在纳米级上进行微小机械运动的能力对于样品或光学的校准和调整往往是至关重要的。
步进和伺服电动机是用于控制光束线应用中使用的机械定位系统中的位置的两个共同驱动方法。步进电机是无刷直流设备,将360度旋转分成相等的步骤。通过顺序地激励线圈绕组的段来诱导运动。步进电机可以通过激励线圈的一个段来保持位置,而无需任何反馈,使其成为需要保持稳定性的低成本,精密应用的良好选择。伺服电机通常是无刷的AC器件,但与步进电机相比,大多数常常使用线圈绕组的三个阶段加上编码器或旋转变压器等反馈装置。该反馈设备允许控制器换乘电机相位并围绕电动机的实际位置关闭PID伺服环,在需要小步长大尺寸和良好保持稳定性的应用中提供显着的优势。
研究目标
本研究的目的是评估电机和反馈技术在最小增量运动(可达到的机械步长)、短期稳定性和长期稳定性方面的性能差异。短期稳定性,或位置抖动,是在短时间内(本研究选择4秒)在感兴趣点测量的运动量。长期稳定性是在较长时间内测量的(本研究选择60分钟)。长期稳定性测试是在各阶段处于平衡状态时进行的,并直接在一个移动序列之后进行,以复制校准样品、光学或其他设备时出现的典型运动和移动序列。
为了评估和隔离这些性能方面,Aerotech设计了一个机械定位平台,基于我们的ANT180-L平台这可以安装几个不同的驱动技术,包括一个12毫米直径x 1毫米螺距滚珠丝杠由步进电机驱动,一个12毫米直径x 1毫米螺距滚珠丝杠由旋转伺服电机驱动,和一个直线伺服电机。用于所有试验的ANT180-L级轴承是带有防笼蠕变机构的交叉滚子轴承。光编码器用于伺服电机的位置反馈和换向。这些包括安装在电机上的旋转编码器(1000 lpr, 1 Vpp输出)和与运动方向一致的直接计量线性编码器(玻璃刻度,20µm信号周期,1 Vpp输出)。使用一个通用的机械平台,模块化驱动和反馈技术有效地控制了由于不同的轴承类型、摩擦、预紧力和制造或装配中的变化导致的结果变化。
测试阶段电机和反馈配置的摘要如表1所示。
| 舞台类型/驱动器 | 描述电机/反馈 |
| 直线电机 | 电机:三相直线电机(BLM-142-A) 线性编码器:玻璃上20µm信号节距编码器;1 Vpp输出(0.3 nm插值电分辨率) |
| 滚珠丝杠和步进电机 | 滚珠丝杠:12毫米直径x 1毫米螺距 电机:0.9°/步双极步进(LIN P / N:5709G-01P) 全步分辨率:2.5µm 微步分辨率:0.5 nm (x5000) |
| 滚珠丝杠和伺服电机(无直线编码器) | 滚珠丝杠:12毫米直径x 1毫米螺距 电机:三相无槽交流伺服电机(BMS60) 旋转编码器:1000 cnts/rev;1 Vpp输出(0.5 nm插值电分辨率) |
| 滚珠丝杠和伺服电机(带线性编码器) | 滚珠丝杠:12毫米直径x 1毫米螺距 电机:三相无槽交流伺服电机(BMS60) 旋转编码器:1000 cnts/rev;1 Vpp输出(0.5 nm插值电分辨率) 线性编码器:玻璃上20µm信号节距编码器;1 Vpp输出(0.3 nm插值电分辨率) |
用于测试的各种阶段配置的固体模型如图1所示。

测试设置
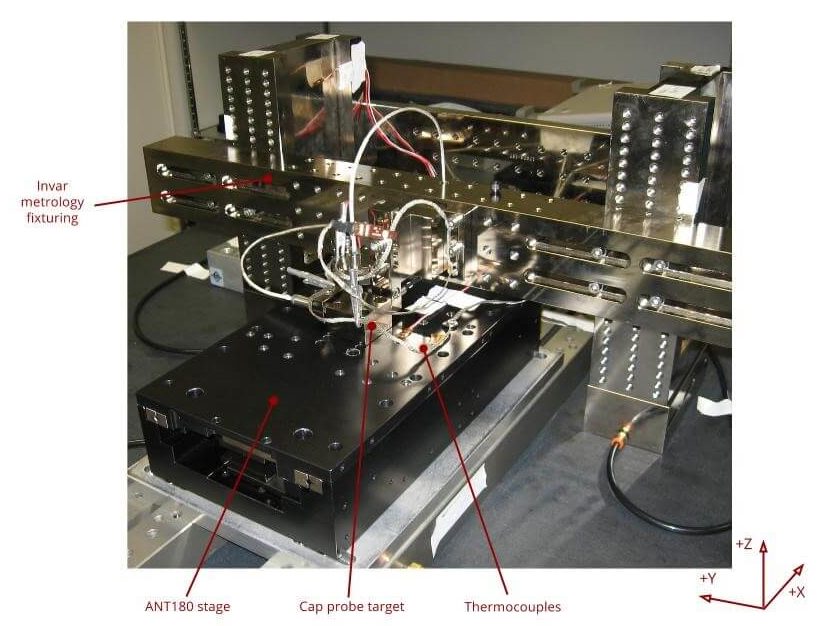
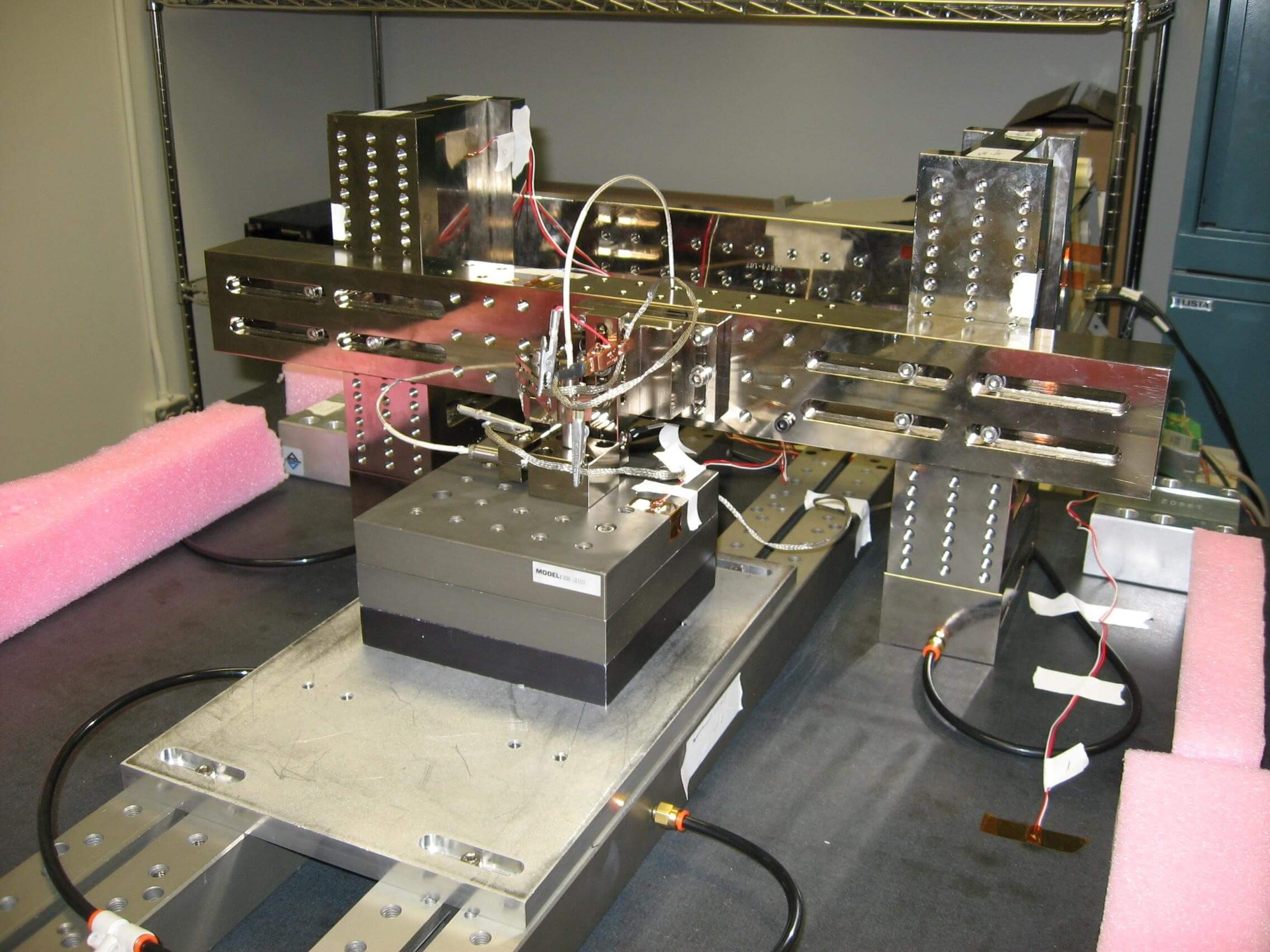
所有测试都是在位于大楼一楼的航空科技工程实验室的空气隔离花岗岩台上进行的。ANT180-L舞台安装在花岗岩上的铝真空轨道上。在所有测试中,工作点位于直线工作台表面上方约25毫米处。在大多数光束线实验中,这是最好的情况,因为大多数偏移量和级堆栈的长度可以达到几百毫米。然而,所使用的测试设置能够对驱动器和反馈技术进行真正的比较,并消除了依赖于应用程序的阶段堆栈安排。
为减小温度波动对计量回路的影响,采用因瓦合金制造了计量夹具。同时,对试验结构进行了设计,以保证结构环刚度足够高,从而不影响位置稳定测量。计量回路夹具的第一共振频率约为615hz(在Y方向弯曲)。
使用Lion电容传感器(Driver P/N: CPL290, Probe P/N: C9.5-5.6-2.0)和安捷伦35670A动态信号分析仪捕获了原位稳定性和最小增量运动测试的位置数据。除非特别说明,数据是在500hz(低于第一个计量回路结构共振)低通滤波。在长期稳定性测量中,热电偶被用来捕获空气、花岗岩、马达和车厢的温度。
所有测试都使用线性放大器(Aerotech的整体对待).选择集成控制平台是因为这是在同步加速器应用中发现的典型航空科技控制器平台。线性放大器的选择使放大器的噪声,如PWM(脉宽调制)开关噪声,没有被诱导到阶段或测量。
测试设置如图2所示。注意,坐标系统表示测试中使用的电容式传感器的正方向。在所有测试中,移动的方向都是x方向。
结果
计量回路(结构)噪声地板
在开始最小增量运动和稳定性测试之前,在所有的X、Y和Z探针上测量了结构计量回路的噪声,其中包括帽式传感器噪声。图3显示了测试设置,其中stage被替换为一系列夹具块。
数据采集时间为4秒,低通滤波到500hz的测量带宽。表2显示了这次测量的结果。
| 方向 | RMS | pk-pk |
| X | 0.14 nm. | 1.11纳米 |
| Y | 0.16纳米 | 1.10纳米 |
| Z | 0.18纳米 | 1.45纳米 |
振动噪声地板
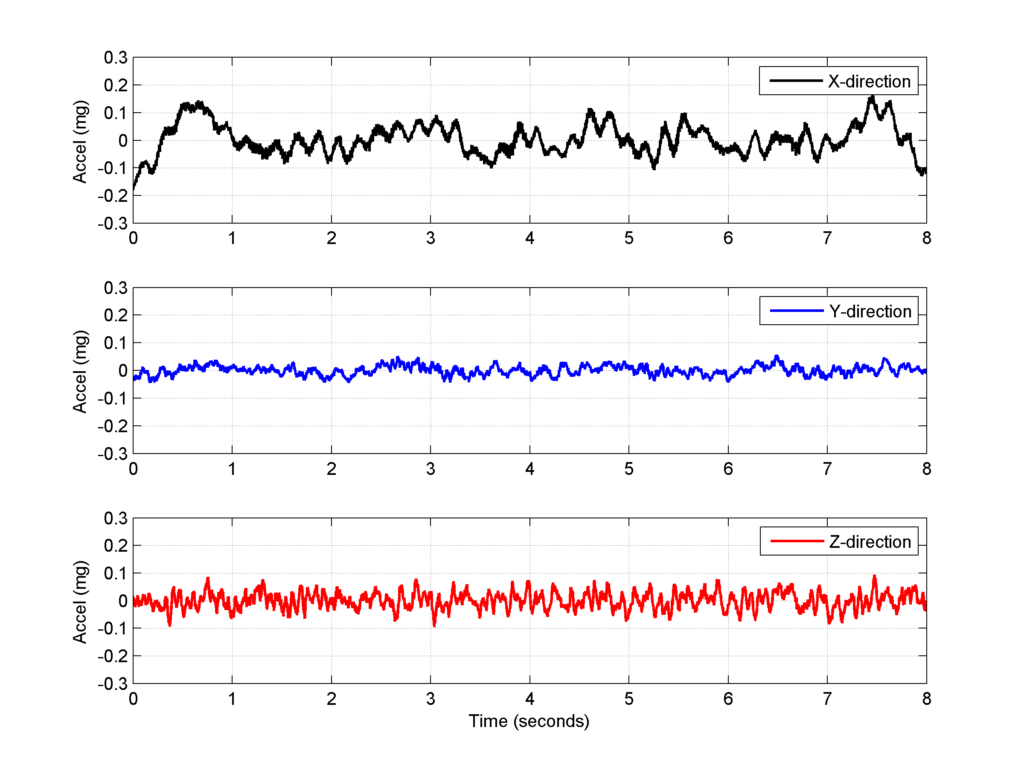
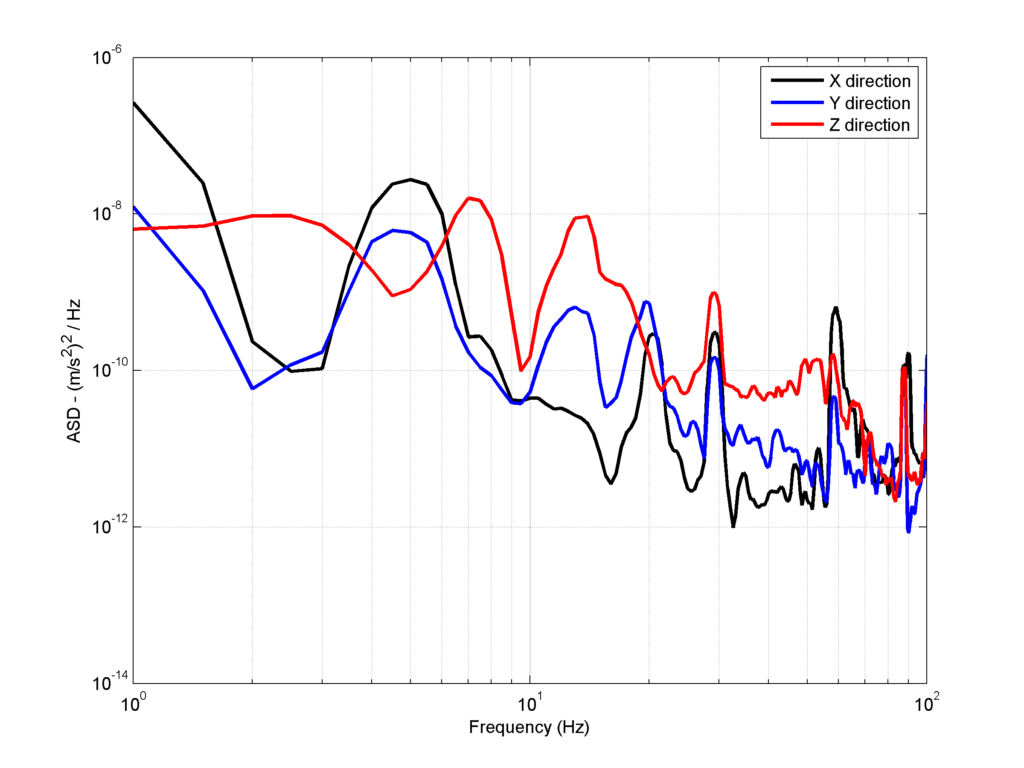
所有的试验都是在空气隔离的花岗岩台上进行的。除了测量测量回路噪声地板外,在对花岗岩表面的振动水平进行量化测量之前,还测量了振动噪声地板。图4为花岗岩在X、Y、Z三个方向上测量的加速度时间数据,图5为各方向得到的加速度谱密度。
最小增量运动测试
阶段配置和最小增量运动试验结果如表3所示。每次测试都从阶段的基本分辨率开始,命令的步长逐渐增大,直到该阶段能够以合理的精度可靠地执行10个前进和10个后退步。
| 阶段类型及驱动 | 线性编码器分辨率 | 旋转编码器的分辨率 | 测量最小增量运动 | 型号 |
| 直线电机 | 0.3纳米 | N/A | 1.5纳米 | 6 |
| 滚珠丝杠和伺服电机(无直线编码器) | N/A | 0.5纳米 | 50纳米 | 7 |
| 滚珠丝杠和伺服电机(带线性编码器) | 0.3纳米 | 0.5纳米 | 1.5纳米 | 8 |
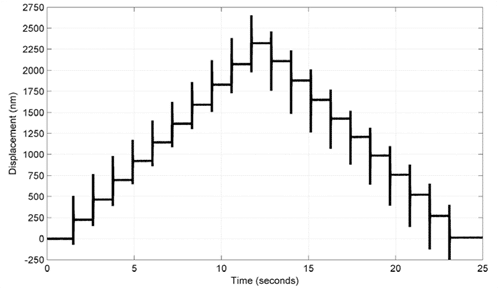
| 滚珠丝杠和步进电机 | N/A | 0.5 nm * | 250海里 | 9 |
*微步时达到的等效分辨率。
最小增量运动测试结论
- 直线电机级实现了1.5 nm的最小增量运动
- 在没有线性编码器的滚珠丝杠和伺服电机的情况下(图7),50 nm的步长大约是极限,每一步的误差没有占步长的很大比例。此外,在这个特定的测试案例中,大约有25纳米的间隙出现在定位阶段。
- 直线编码器添加到滚珠丝杠和伺服电机阶段允许1.5 nm的步长-相同的直线电机阶段。
- 步进电机级能够获得大约250 nm的步长,而没有显著的步长误差。小的步骤是可识别的,但重大的步骤不准确是存在的。每一步开始时的振动是步进电机共振的结果。这种振动可以通过在舞台轴上使用一个机械阻尼器或应用电子阻尼来最小化,这两种方法在本研究中都没有使用。
短期稳定性(位于位置抖动)测试
四种不同的阶段配置测试短期保持稳定性(位置抖动)。在使用电机进行测量之前,允许所有级配置在环境中保持至少12小时的平衡。对步进电机配置进行了0%保持电流和20%保持电流的测试。
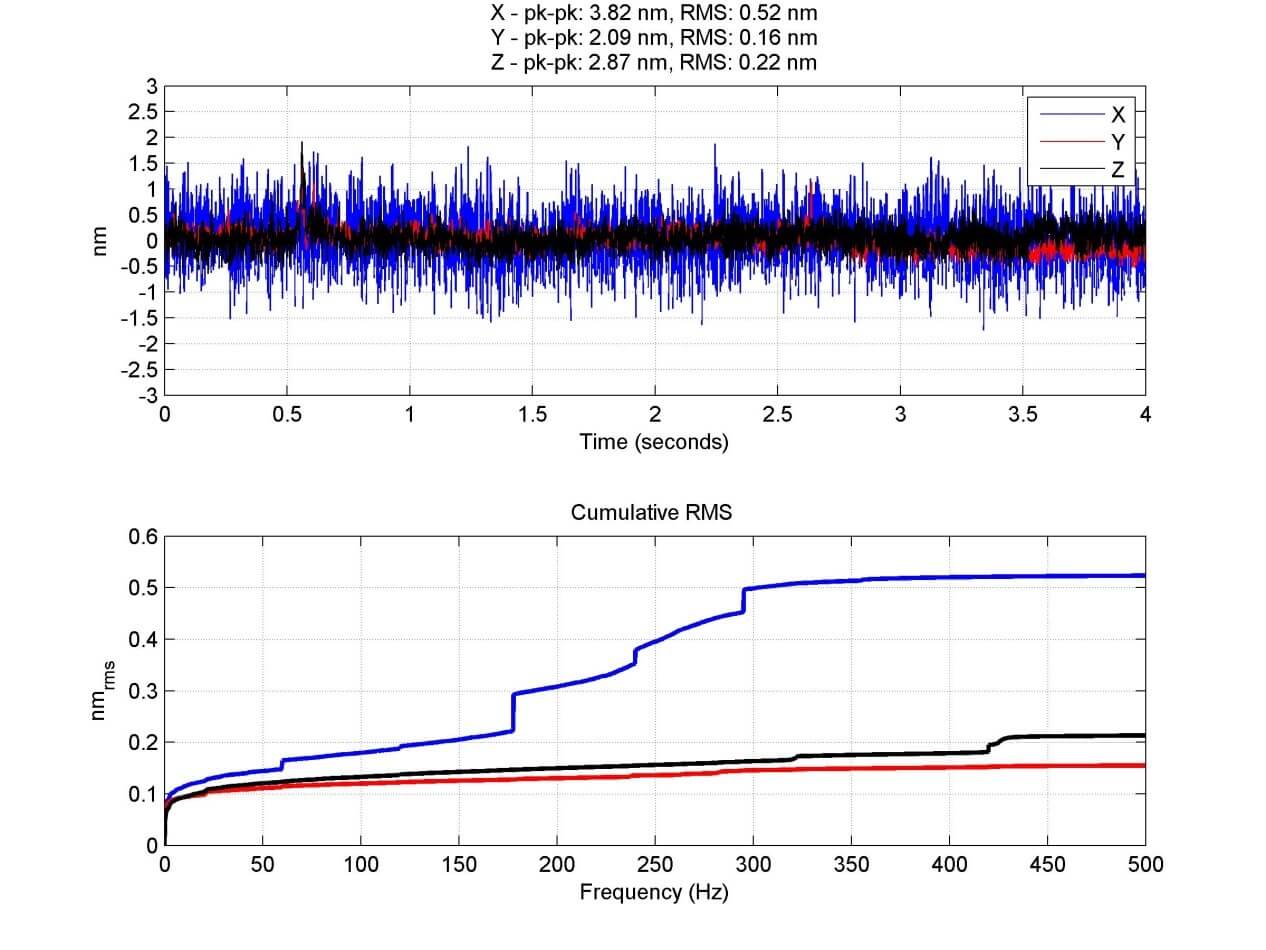
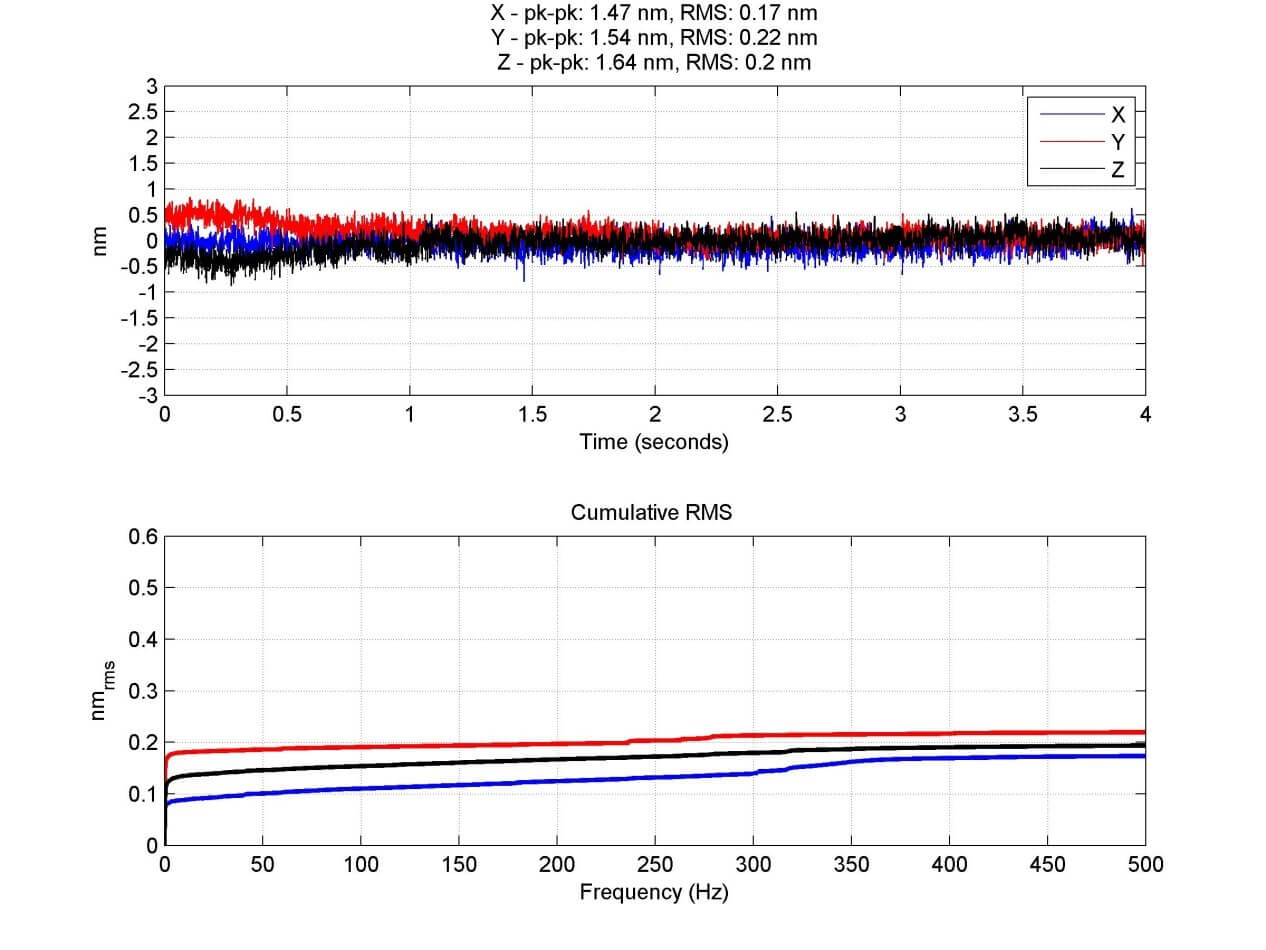
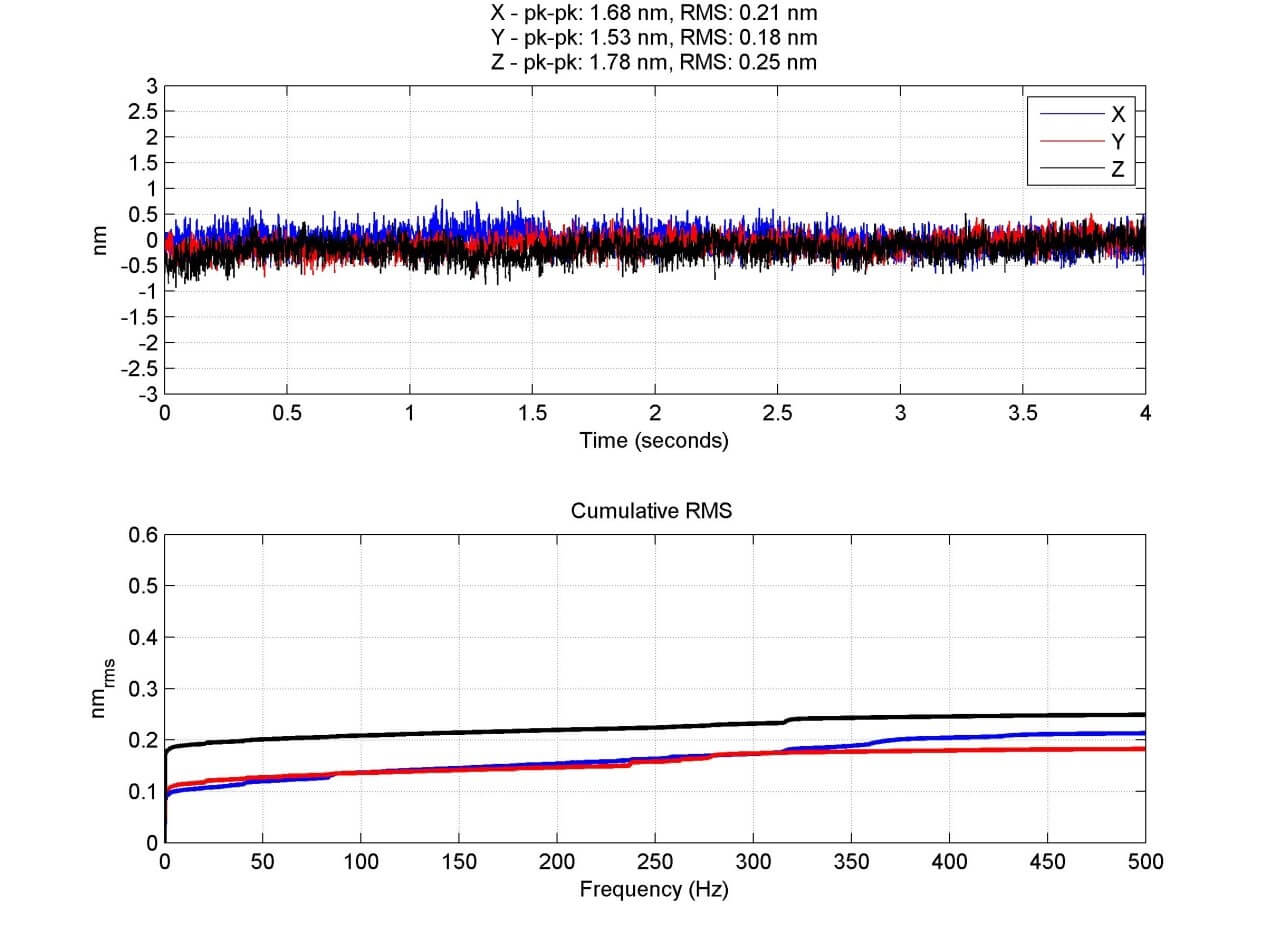
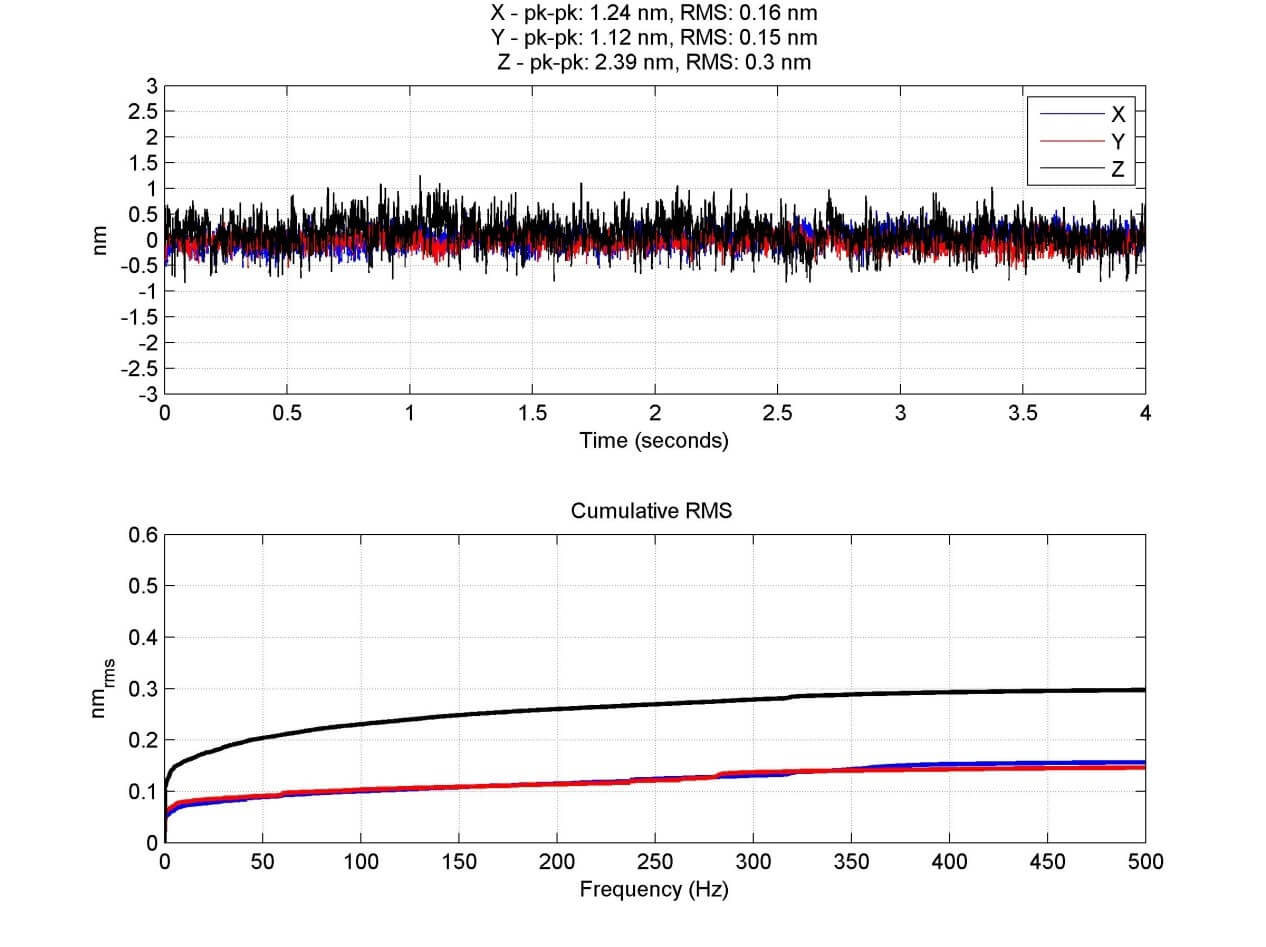
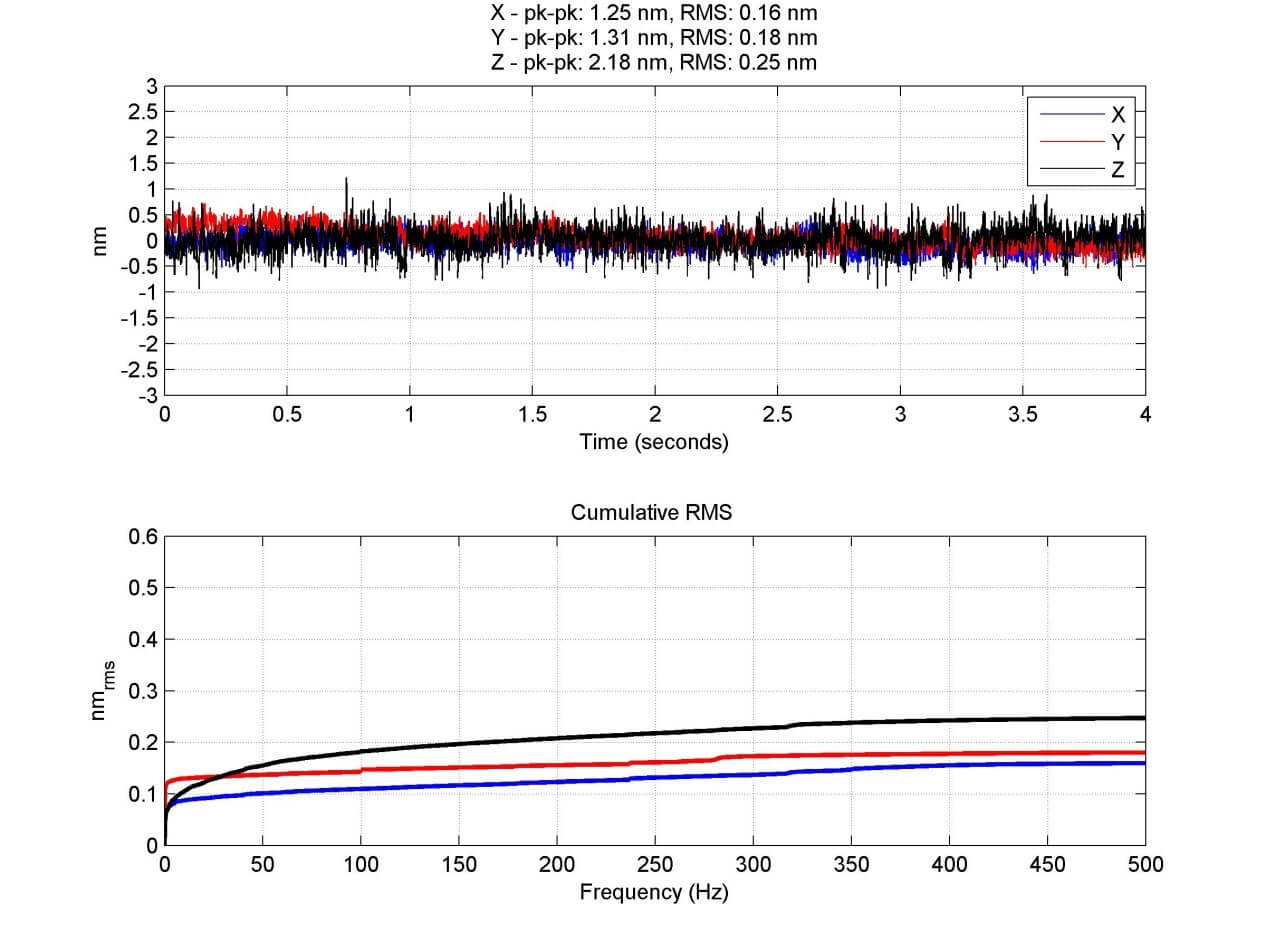
数据采集时间为4秒,RMS和pk-pk抖动值在500 Hz测量带宽下报告。阶段配置和结果如表4所示。图10-14显示了每个测试的位置抖动时间捕获和累积RMS抖动结果。
| 阶段类型及驱动 | RMS(方向) | pk-pk(方向) | RMS(上) | pk-pk(上) | RMS (z) | pk-pk (z) | 型号 |
| 直线电机 | 0.52纳米 | 3.82纳米 | 0.16纳米 | 2.09纳米 | 0.22纳米 | 2.87纳米 | 10 |
| 滚珠丝杠和伺服电机(无直线编码器) | 0.17纳米 | 1.47 nm. | 0.22纳米 | 1.54纳米 | 0.20纳米 | 1.64纳米 | 11 |
| 滚珠丝杠和伺服电机(带线性编码器) | 0.21纳米 | 1.68纳米 | 0.18纳米 | 1.53纳米 | 0.25 nm. | 1.78纳米 | 12 |
| 滚珠丝杠和步进电机,(0%保持电流) | 0.16纳米 | 1.24纳米 | 0.15纳米 | 1.12纳米 | 0.30纳米 | 2.39纳米 | 13 |
| 滚珠丝杠和步进电机(20%保持电流) | 0.16纳米 | 1.25纳米 | 0.18纳米 | 1.31纳米 | 0.25 nm. | 2.18纳米 | 14 |
短期稳定性测试结论
- 所有的级配置在X, Y和Z方向上都有小于4nm的pk-pk抖动测量。
- 在这次测试中,螺旋驱动阶段的表现略好于直接驱动阶段。
- 值得注意的是,Aerotech还制造了其他的直线电机级和驱动器,使得直接驱动电机的抖动可以与螺旋系统相媲美。
长期稳定性测试
四种不同的阶段配置进行了超过60分钟的长期保持稳定性测试。首先,进行了一个基线测试,允许该阶段在启用马达的情况下与环境保持一整天的平衡。在X、Y和Z方向测量位置稳定性,同时捕获测量装置和工作台各部分的温度。
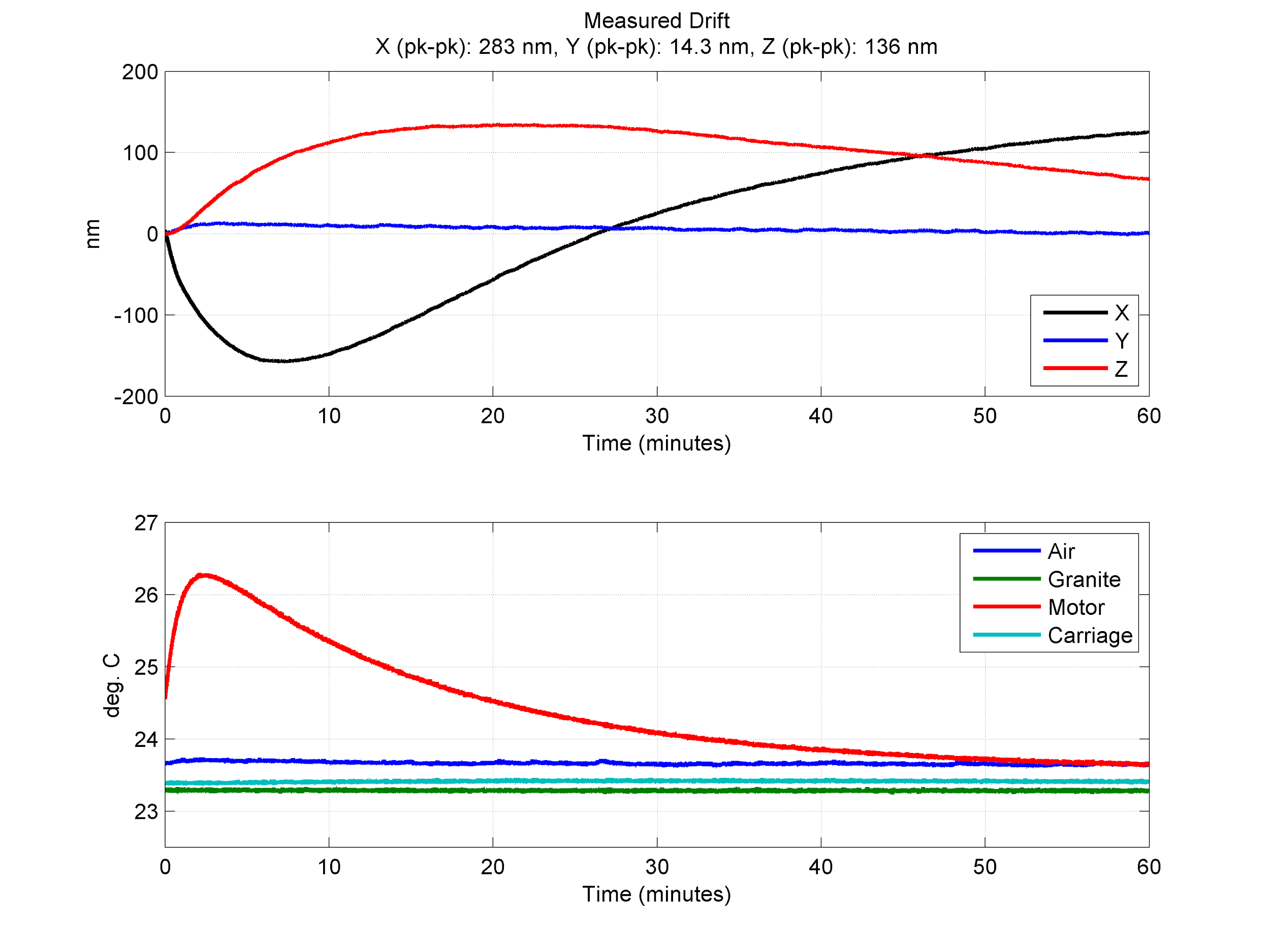
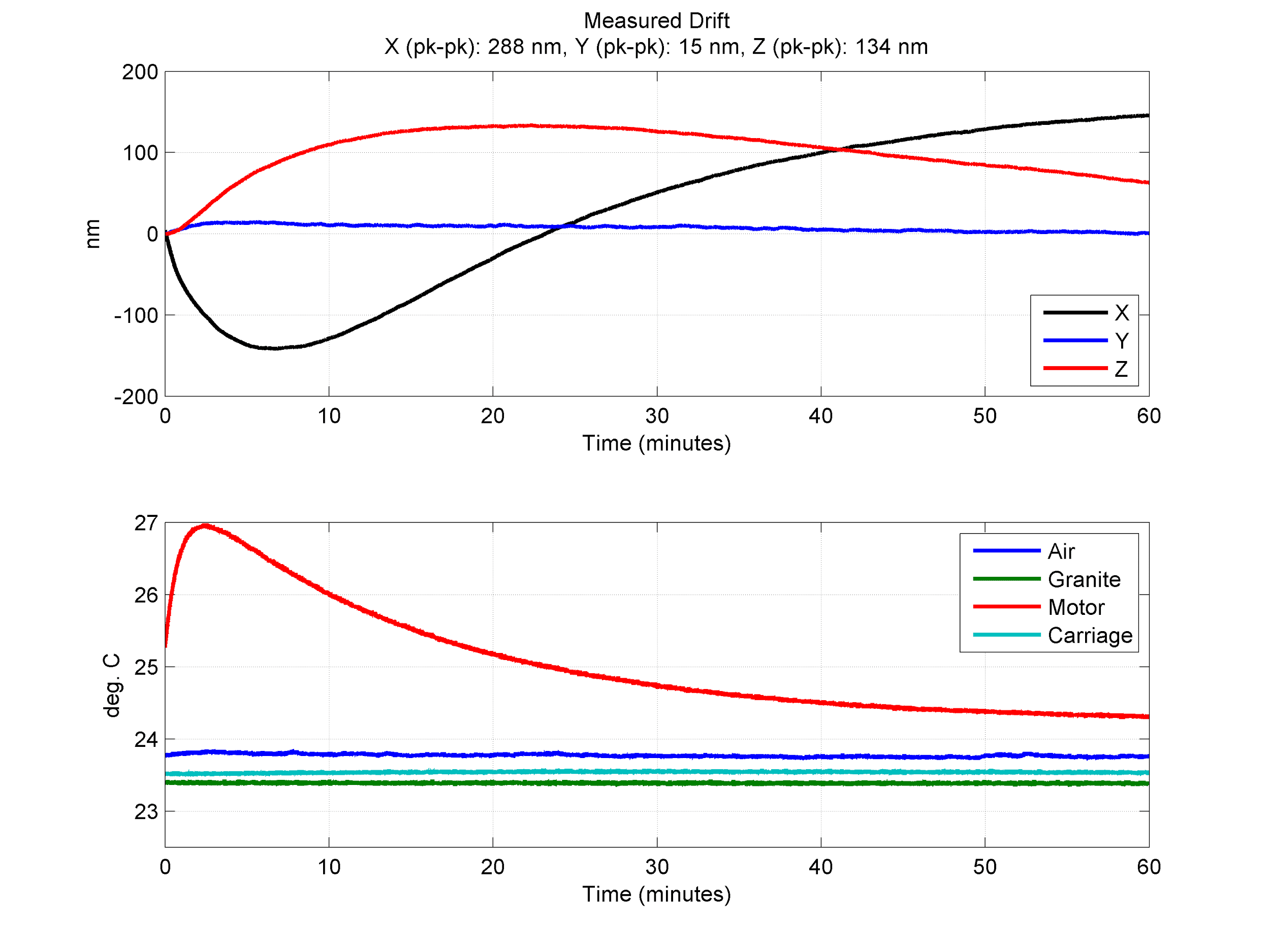
在长期基线测试之后,要求各阶段以6 mm/s的速度,以200 mm/s2的加速/decel速率,在50 mm以上、45秒的时间内进行相对良性的移动。然后将工作台带入电容探头范围,并在60分钟内捕获位置稳定性。这种移动轮廓测试的目的是在进行实验之前复制定位一个样本或光束运动平台的运动。
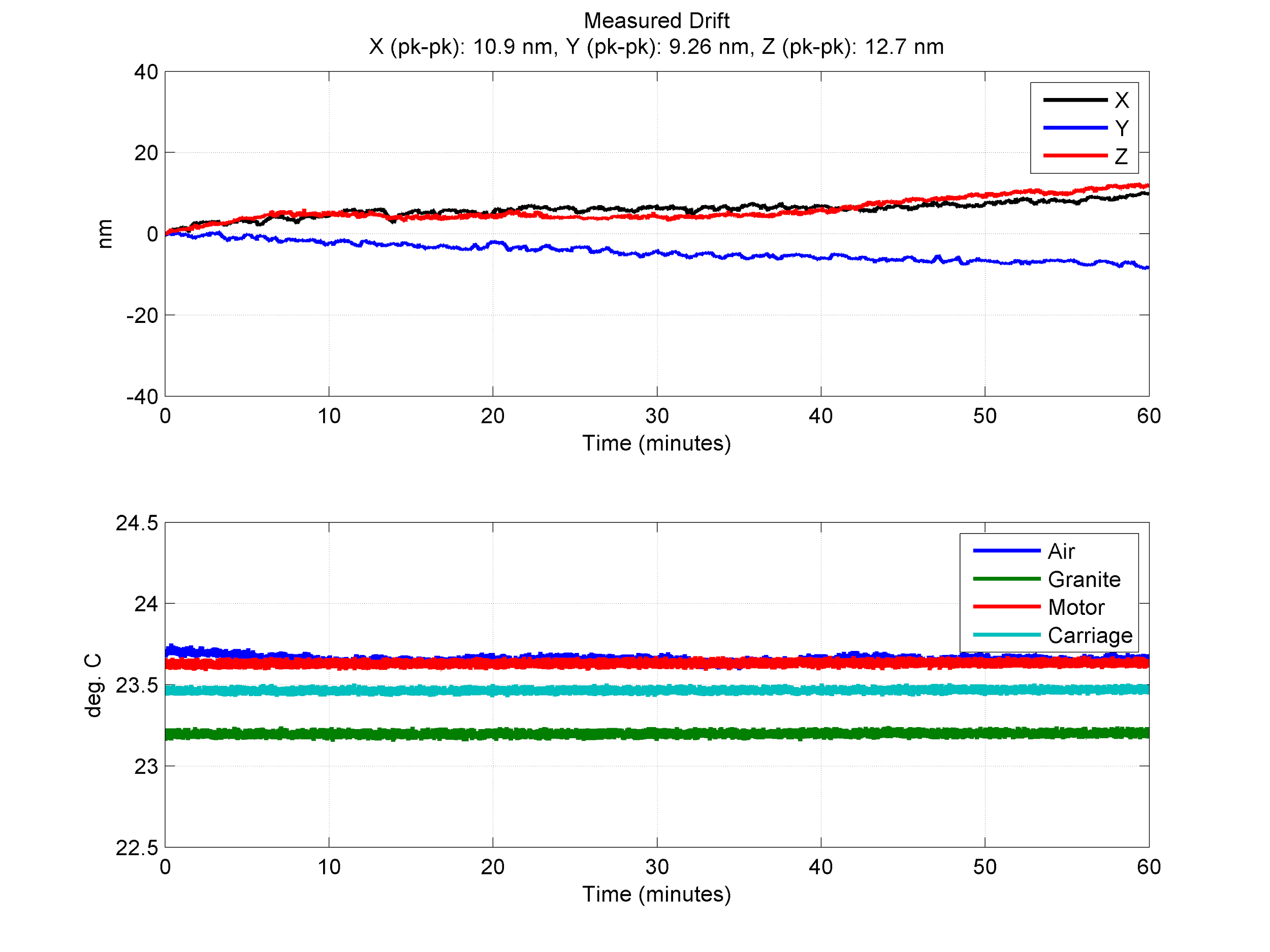
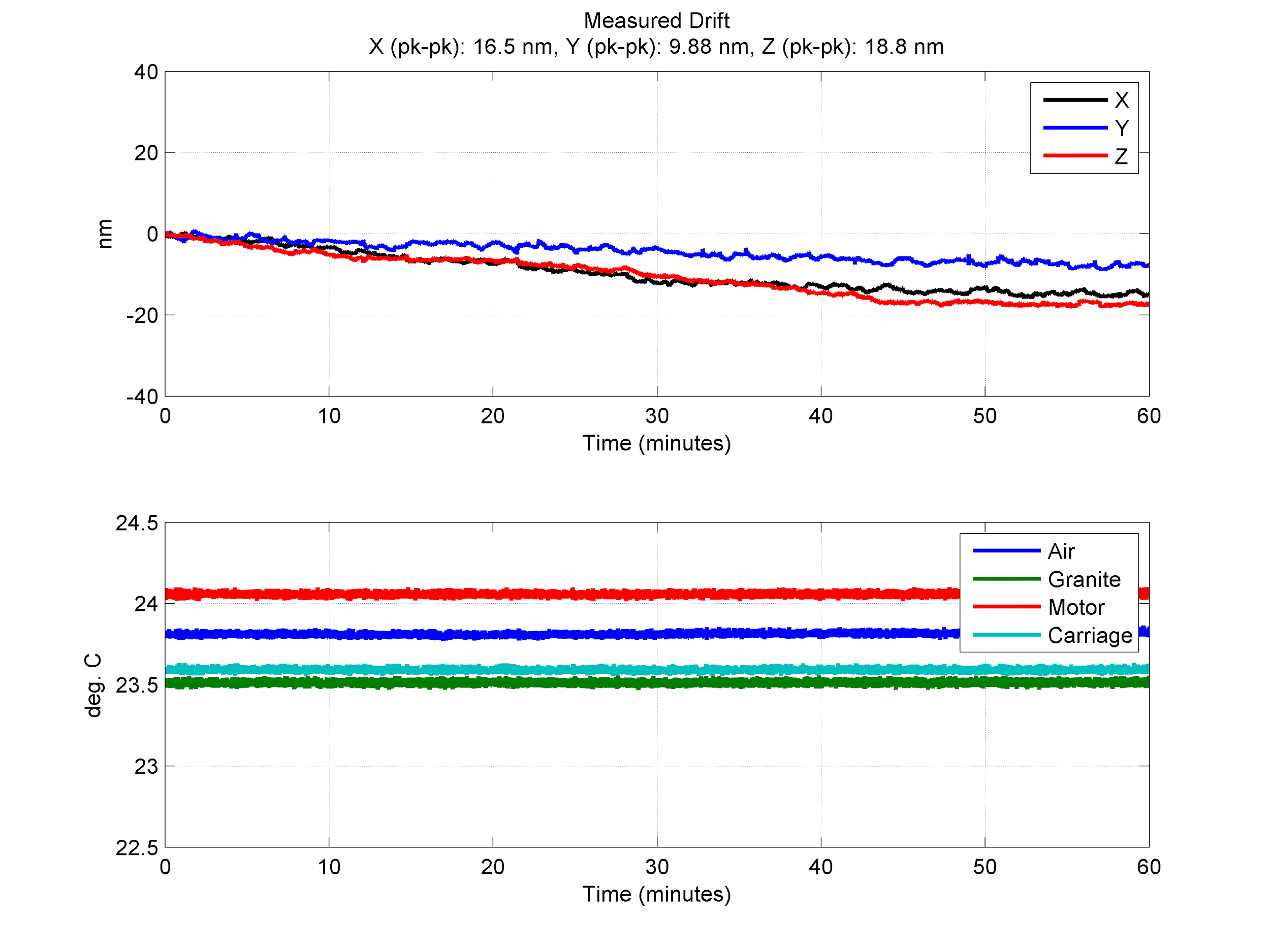
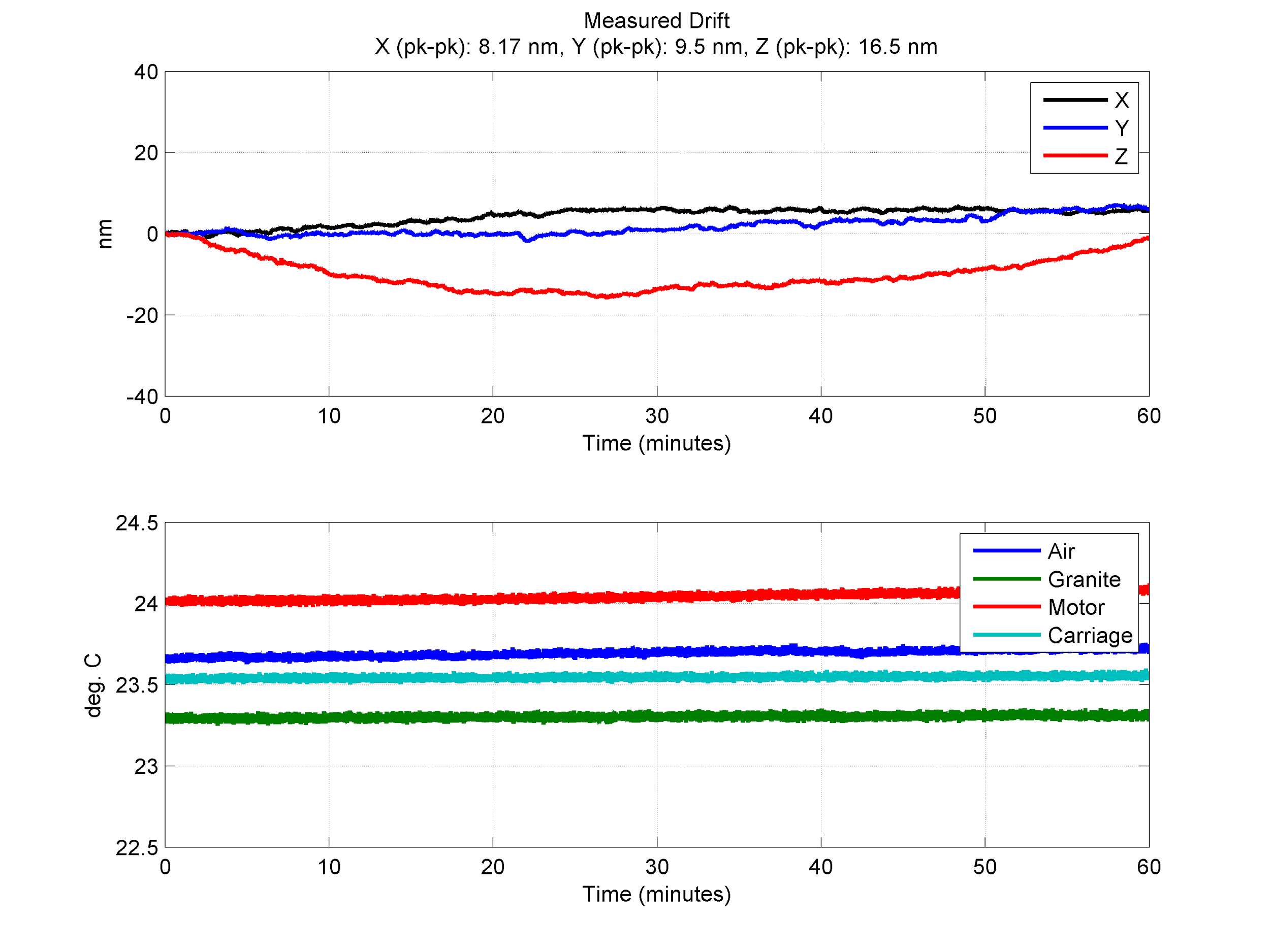
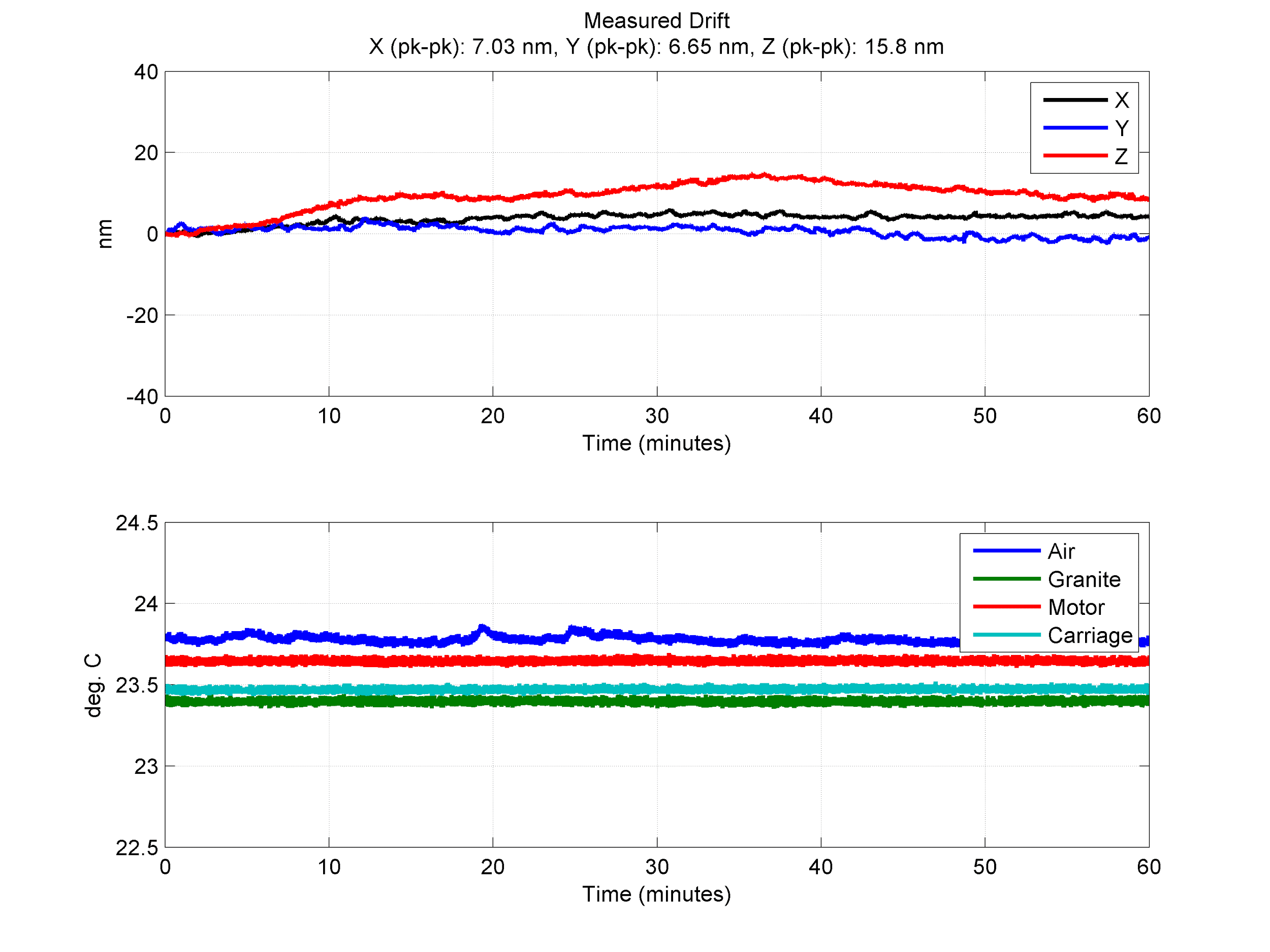
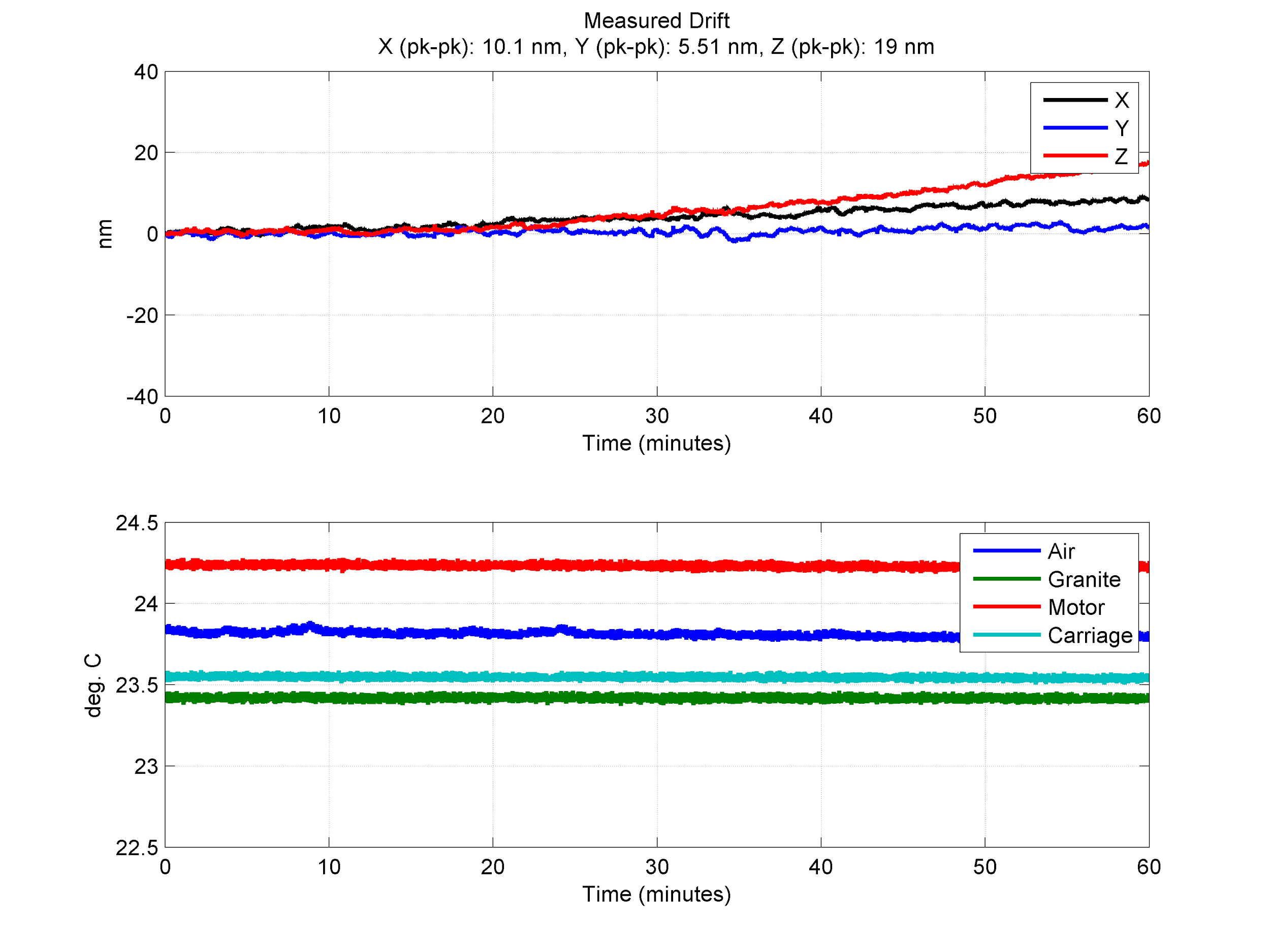
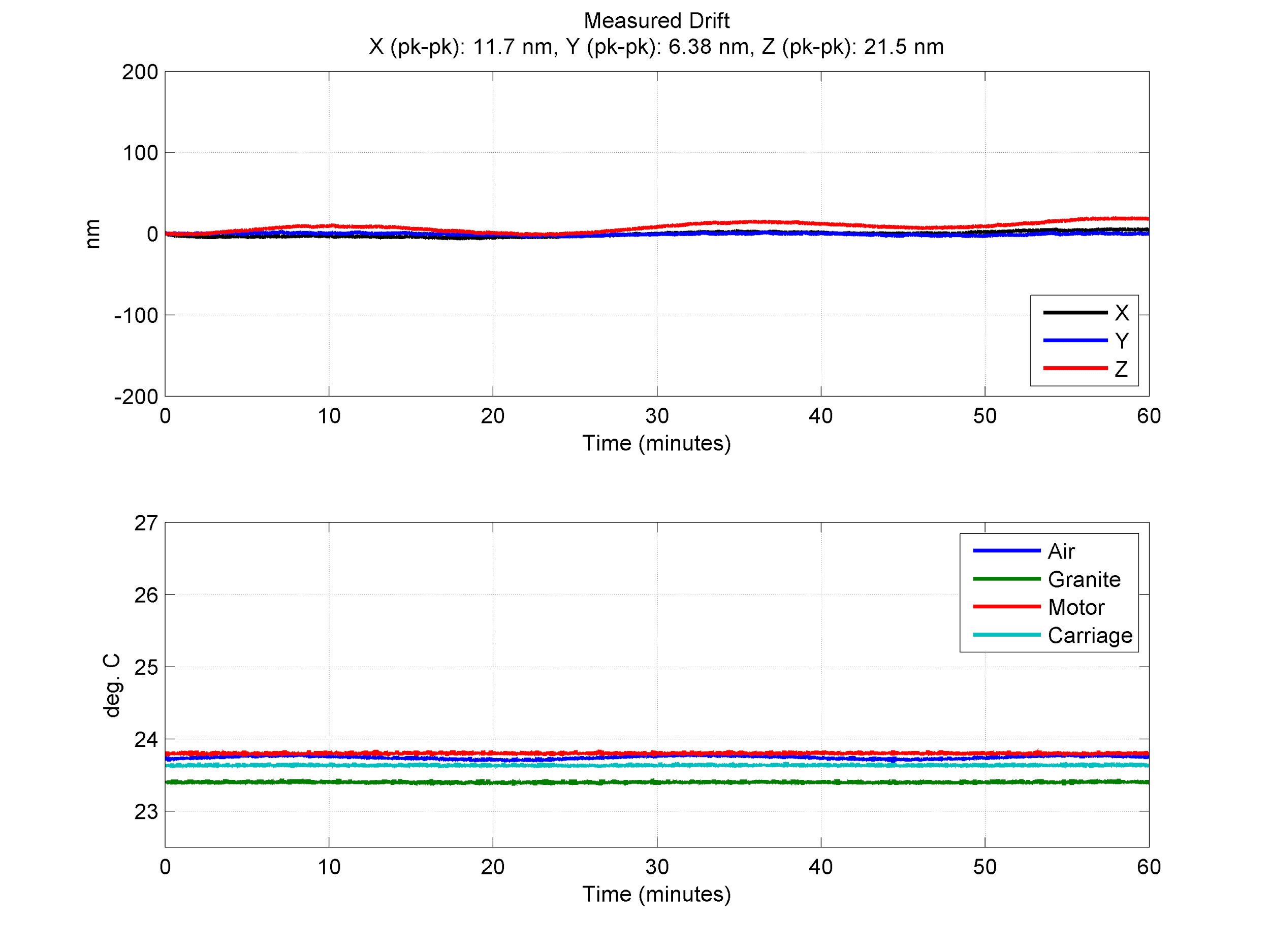
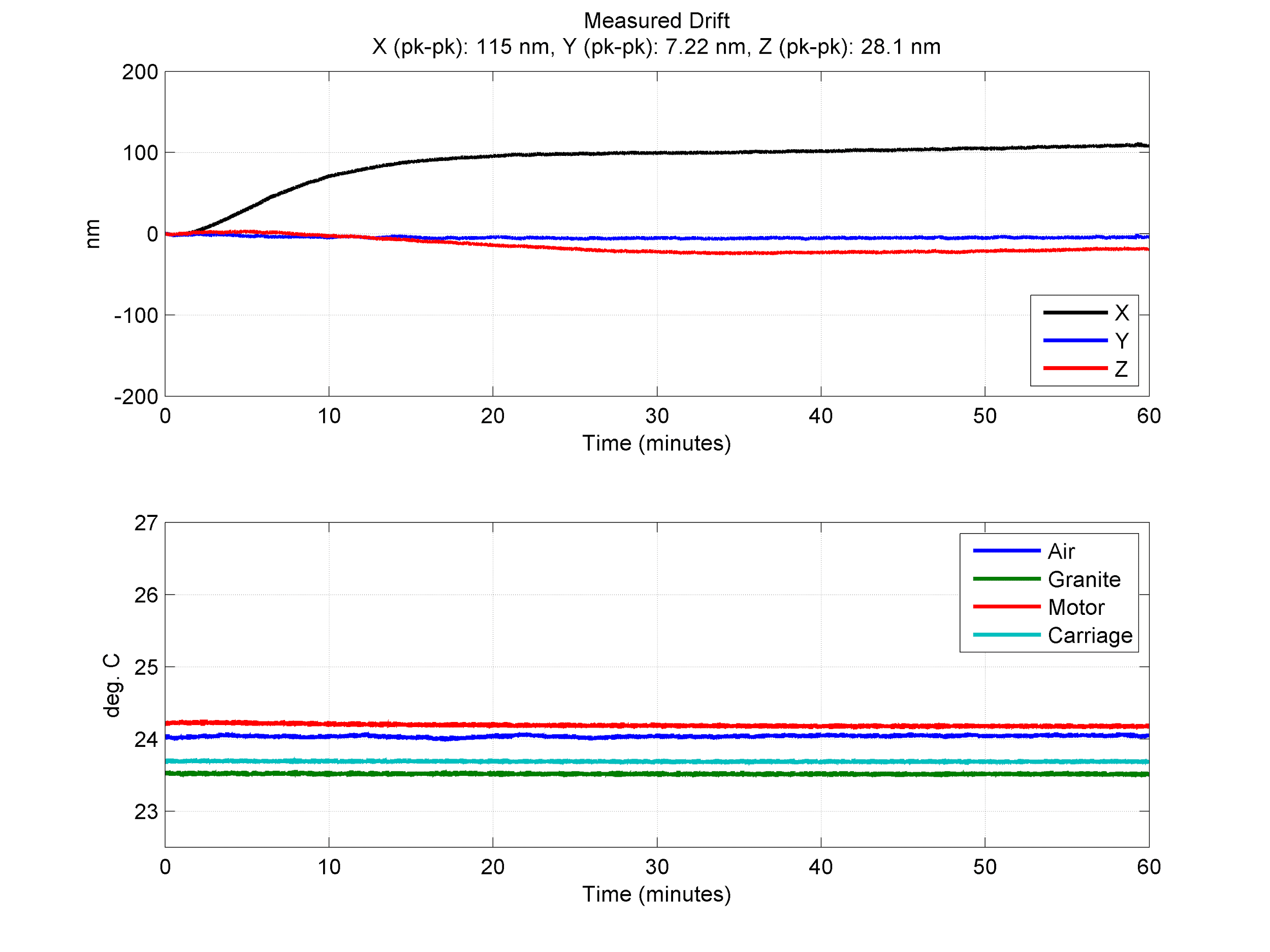
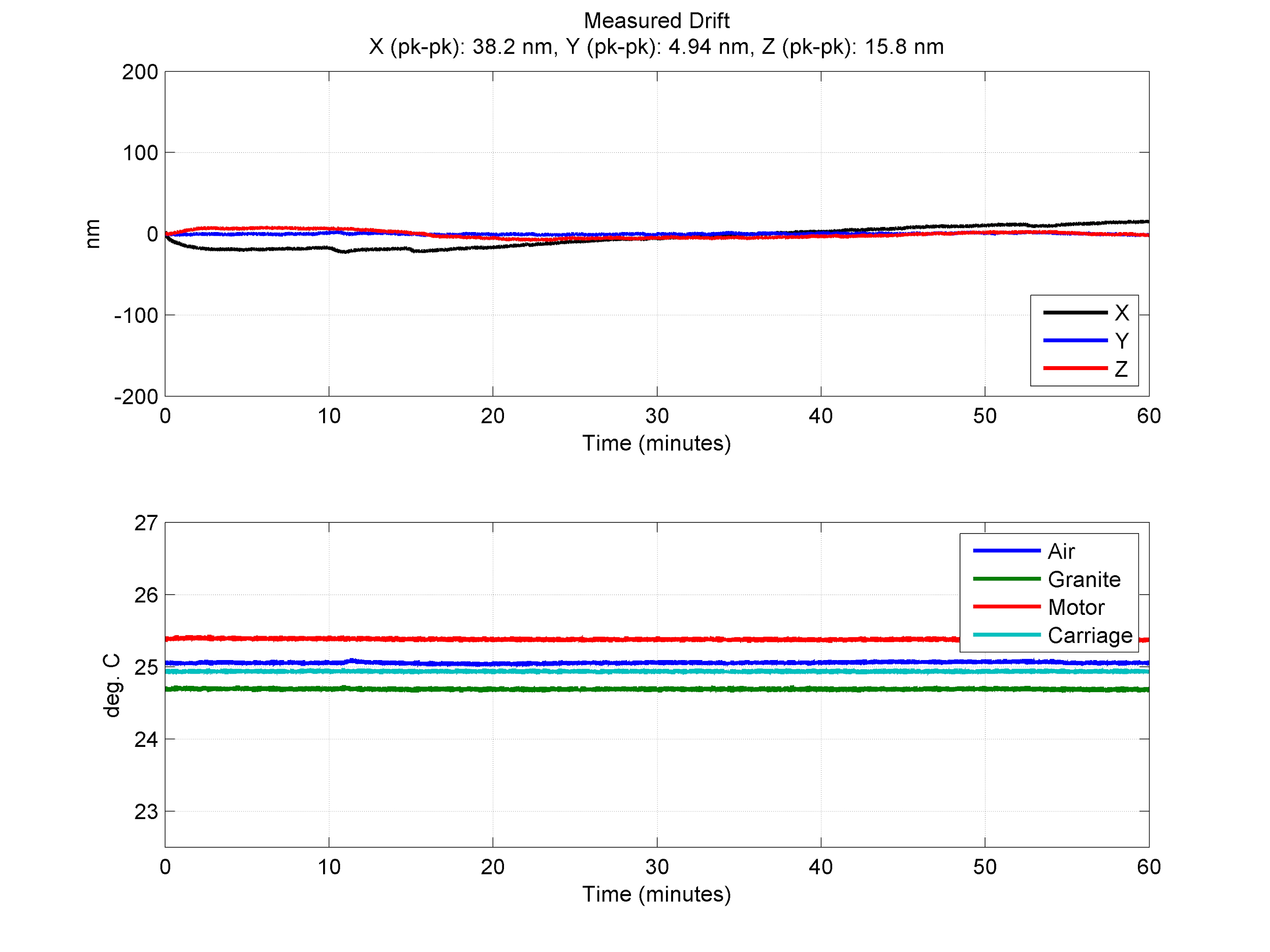
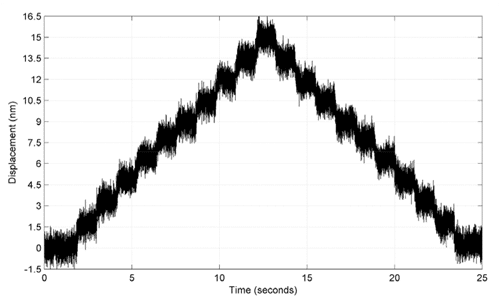
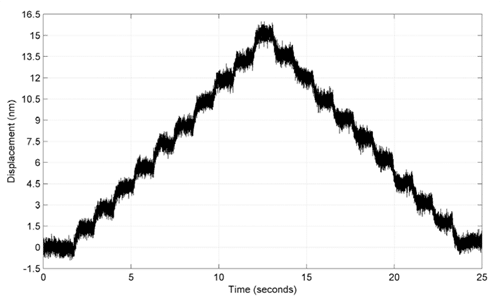
长期稳定性试验的摘要见表5。所有测试的漂移和温度测量数据如图15-22所示。
| 阶段类型及驱动 | 在测试前移动常规 | 稳定性(nm) | 稳定性(nm) | 稳定性(nm) | 型号 |
| 直线电机 | 不 | 10.9 nm. | 9.3纳米 | 12.7 nm. | 15 |
| 滚珠丝杠和伺服电机(无直线编码器) | 不 | 16.5纳米 | 9.9纳米 | 18.8纳米 | 16 |
| 滚珠丝杠和伺服电机(带线性编码器) | 不 | 8.2纳米 | 9.5 nm. | 16.5纳米 | 17 |
| 滚珠丝杠和步进电机(0%保持电流) | 不 | 7.0纳米 | 6.7纳米 | 15.8纳米 | 18 |
| 滚珠丝杠和步进电机(20%保持电流) | 不 | 10.1纳米 | 5.5纳米 | 19.0纳米 | 19 |
| 直线电机 | 是的 | 11.7纳米 | 6.4纳米 | 21.5纳米 | 20. |
| 滚珠丝杠和伺服电机(无直线编码器) | 是的 | 115海里 | 7.2纳米 | 28.1纳米 | 21 |
| 滚珠丝杠和伺服电机(带线性编码器) | 是的 | 38.2纳米 | 4.9纳米 | 15.8纳米 | 22 |
| 滚珠丝杠和步进电机(0%保持电流) | 是的 | 283海里 | 14.3纳米 | 136海里 | 23 |
| 滚珠丝杠和步进电机(20%保持电流) | 是的 | 288海里 | 15.0纳米 | 134海里 | 24 |
长期稳定性测试结论
- 所有阶段在基线长期稳定性测试中都是类似的(没有常规移动)。由于在60分钟的测量时间内房间内的温度变化,测试之间的测量漂差(5-10纳米)完全在预期范围内。
- 当进行常规运动时,测量到的步进电机级在运动方向上的漂移比直线电机级高23倍,比带直线编码器的伺服电机高约7倍。
- 对于滚珠丝杠/伺服电机和移动程序的测试案例,在X方向观察到约115 nm的漂移,工作台上测点的温升最小(电机经历了约0.1°C)。这种漂移的原因可能是由于加热和滚珠丝杠的迟滞,因为测量的位移在允许平衡2-3小时后没有回到起始位置。
- 正如预期的那样,线性编码器(直接反馈)有助于显著减少漂移在运动方向。
结论
在需要最高水平的位置抖动(短期稳定)的应用中,带有线性放大器的滚珠丝杠驱动级表现最佳。直接驱动直线电机级与滚珠丝杠驱动级的竞争仅略差的位置抖动(~ 4nm相比~ 2nm pk-pk)。航泰拥有标准线性电机级设计,位置抖动值在1-2纳米范围。
直接驱动直线电机级明显优于螺旋驱动级的地方在于,它们能够进行小的机械运动(最小增量运动),并在较长时间内保持良好的保持稳定性。在滚珠丝杠伺服电机工作台上增加直线编码器,可以改善两者;然而,运动的速度和平稳性通常会受到影响。例如,许多新的x射线成像应用需要更明亮的x射线(更高的亮度)。如果不能快速成像,这些更明亮的x射线有可能损坏样品。由于这个原因,许多应用程序正在向扫描方向发展,而不是逐步测量-逐步测量的方法。由于采用非接触驱动机制,直接驱动级天生就更适合这些扫描应用。
虽然步进电机阶段是一个成本效益和简单的方式进行定位,他们遭受一个主要的缺点-热。当坐着休息时,很常见的是将电流降低到较低的水平(有时0%保持电流)。然而,正如这次测试所显示的,即使是45秒的步进电机级运动也会引起几度的温升,这将导致数百纳米的漂移,需要1小时才能达到平衡。真空应用通常加剧这种漂移,因为热管理变得更加困难。伺服电机级有一个固有的优势,他们只在需要时使用电流。这有效地减少了加热和热漂移的影响,并允许一个更稳定的定位系统。
随着在更高且更高分辨率的图像样本的寻求继续,定位系统将在实现这些高质量图像方面发挥不断增加的作用。这种用于极其精细的定位和稳定性的能力使线性和旋转伺服电机都具有出色的应用选择,其中实现了样品和光学定位中的亚微米或甚至纳米精度是至关重要的。
附录
附录A:最小增量运动测试图

附录B:短期稳定性试验区
附录C:长期稳定性试验区