航空航天和国防,应用笔记,定制工程运动系统,电子,龙头,综合自动化系统,激光扫描头,激光系统,医疗设备制造,运动控制平台,工艺专用产品,阶段和执行器新万博英超h
应用笔记
使用模式锁定激光器同步位置同步输出(PSO)
许多激光器仅限于基于内部时钟源的发射脉冲,不能从诸如Aerotech的外部信号中异步触发位置同步输出(PSO)特征。使用这种激光类型的一种方法是将PSO输出的脉冲宽度设定为与激光时钟信号的时段相同,以确保PSO输出在激光输入采样时间(通常是上升或下降时钟的边缘)。然而,在实践中,PSO和激光时钟的频率基于用于合成时钟的装置的公差而变化。当PSO输出宽度短于激光时钟周期或输出宽度长于时钟周期时,这种可变性将导致错过的脉冲。
为了解决这个问题,Aerotech增加了与激光时钟信号同步PSO输出脉冲的开始。目前支持此功能NDrive HPE和ndrive hle产品,并将添加到第4.06版中的Nmark CLS中。对于NDrive HPE和NDrive HLE,时钟信号连接到差分RS-422 AUX编码器SIN + / SIN信号。AUX编码器必须通过将驱动器上的EncoderDivider参数设置为“0”来配置为输入。NMARK CLS必须在工厂(工程特殊)进行修改,以支持激光时钟同步操作。将来,此功能将在标准产品上提供。对于NMARK CLS,输入信号是5V TTL兼容。
以下列出了启用激光时钟同步功能所需的命令:
psooutput <轴> pulse extsync
psopulse <轴>时间<总时间>,
PSOoutput extsync命令使外部时钟输入模式启用,而Psopulse延迟值指定相对于激光时钟的上升沿的输出脉冲的定时。Psopulse延迟值是可选的,如果需要,可以设置为0。
使用该特征将导致点位置的位置精度降低,因为PSO输出信号延迟直到激光时钟的下一个上升沿。点放置精度的最大降低与轴(以单位/秒)的线性速度成比例,乘以激光时钟周期的求和和秒的PSopulse延迟。例如,假设编程速度为100 mm / s,时钟频率为200 kHz,延迟时间为2.5μs。最大脉冲放置误差将计算如下:
100 mm / s•(1/200000 + 0.0000025)= 100 mm / s•(0.0000075)=0.75μm
脉冲放置精度将从延迟时间设置的最小值变化到由组合的延迟时间和时钟周期计算的最大值(如上所示)。
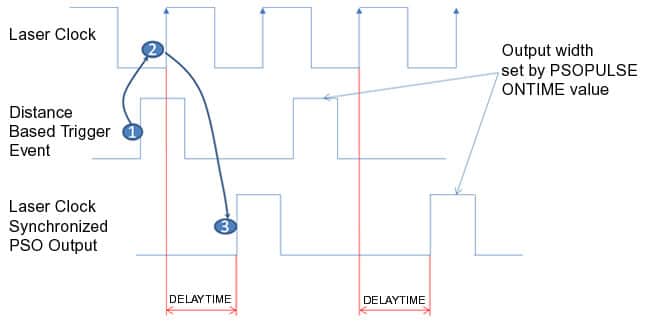
图1显示了PSO输出脉冲相对于激光时钟的定时以及延迟时间设置的效果。
如果需要多个输出脉冲,则应增加Psopulse OnTime以跨越多个激光时钟采样事件。
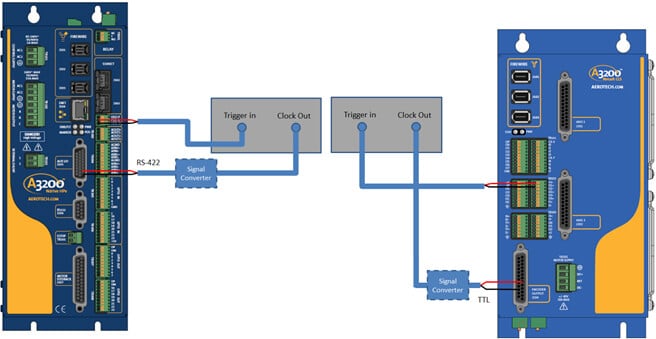
图2示出了激光器,NDrive HPE和NMARK CLS产品之间的接线接口的近似值。有关接线连接点的详细信息,请参阅系统文档。
概括
通过使用PSOoutput extSync命令,可以使用外部时钟源在NDrive HLE,NDRIVE HPE或NMARK CL上同步PSO输出。由于激光输出相对于所需的射击位置,用户应该意识到对点放置精度的影响。最后,可能需要修改来自激光的时钟源以支持连接驱动器的输入规格(用于NDRIVE HPE / HLE的RS-422和NMARK CLS的5V TTL)。