三维测量系统,航空航天和国防,定制工程运动系统,数据存储,电子,龙门架,框架和光学支架,六脚,集成自动化系统,激光系统,医疗设备制造,运动控制平台,光学和光子,压电纳米定位器,精密制造,新万博英超h工艺特定产品,科学和研究机构,半导体,工作台和执行器,测试和检验,白皮书
白皮书
用计量方法测量和提高定位系统的性能
RJ哈特
3D计量系统总监
客观陈述
本白皮书将解释什么是定位系统计量,为什么它是重要的,如何进行计量,以及如何利用这些结果。计量是为了确保设计人员的定位系统在机械建造后满足一套要求的规格。以下材料将在闭环控制下用于精密电动定位器。

什么是运动计量?
运动计量是设计师可能关心的不同性能指标的定义和测量值的实用科学。它允许某人验证设计和制备机电定位系统之间的差异。通过使用各种计量技术测量原制系统来完成此验证。
了解使用计量测量的内容
作为一种简化方法,运动计量学被用于测量定位系统在物理空间中a点和B点之间移动的能力的“良度”。没有任何电动定位系统能够在这两点之间完美地移动。运动中的不完美是由于误差源是固有的或在一个已建成的定位系统中存在的。
由于运动发生在物理空间中,所以有办法将定位系统的实际几何性能与不同的数学坐标系联系起来。一种常见的方法是使用笛卡尔坐标系并将运动与空间中的一点联系起来。这个空间点可以根据设计师的需要移动任意多的自由度,但每增加一个额外的运动自由度都需要一个额外的机械定位轴。
图2中所示的坐标框表明笛卡尔空间中的点可以移动到达六个不同的方向或自由度。线性平移轴和旋转轴的混合用于实现所有六个自由度。
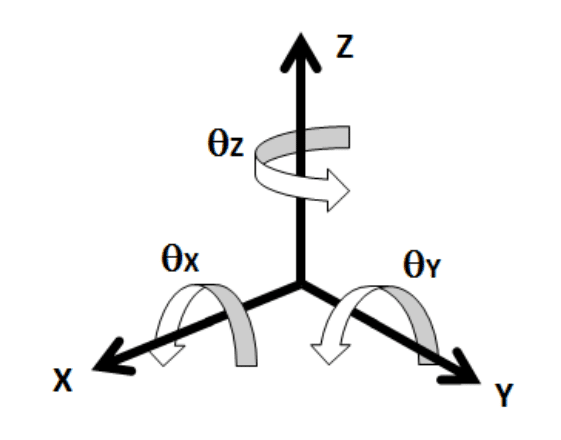


使用计量技术将允许设计师测量这些轴的“优点”,无论是作为个体,还是在空间的特定点组合。结果将验证该定位系统满足其设计的几何规格的能力。
如何量化这些测量
有一些行业认可的方法来量化机动定位系统的性能。这些通常被称为定位规范,可以用来量化静态和动态运动特性。性能规范在工业上被接受,因为它们可以用计量技术测量和验证。
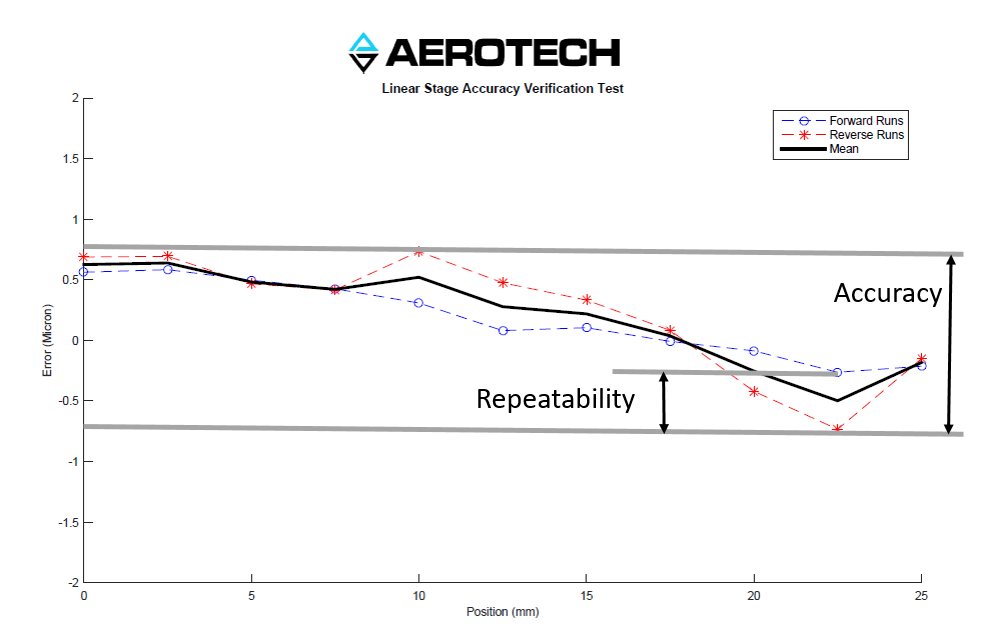
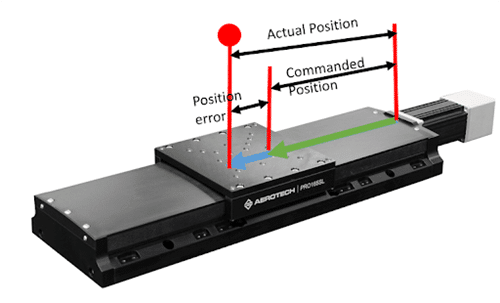
首先,要求量化定位系统性能的最常见规范是运动的准确性和可重复性。从根本上说,它们是近端位置对命令位置的近距离的测量以及结束位置分别接近一系列相同的命令。这在图5中示出。每个点的“命令位置”是在目标的中心。根据准确性和重复性拾取目标中心的任何偏差。
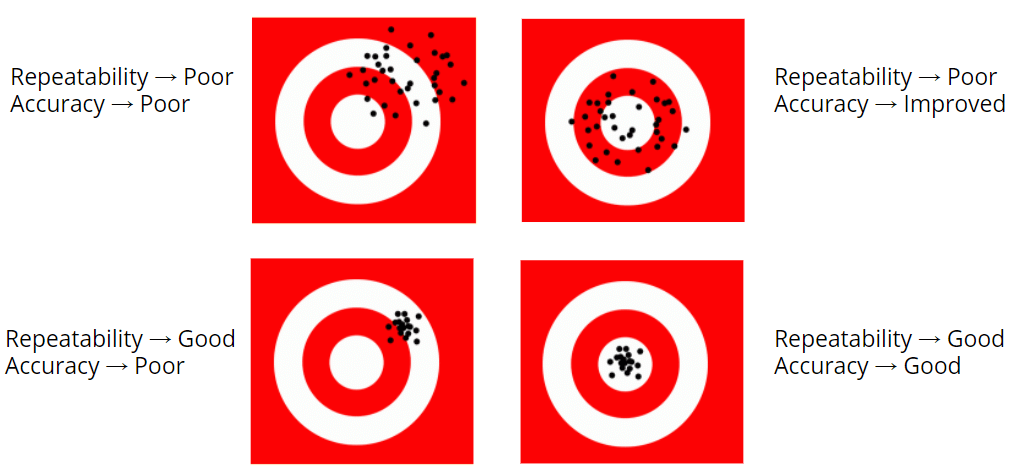
精度和可重复性通常是用于单个运动方向的规格,其中机械定位器设计用于移动。这称为“轴上”方向。例如,设计者可以命令50毫米在机械线性定位器上移动。如果定位器实际移动50.5毫米,则它将具有0.5毫米的轴精度。这种在轴精度被认为是机械系统中的错误源。错误来源是所有定位系统永远无法完美地从点A移动到点B的原因。
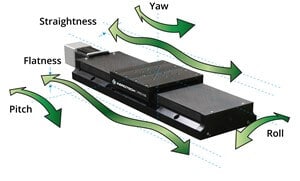
要理解的重要概念是机械定位轴具有多于一个错误源。尽管理论上,它被限制在一个自由度中移动,但是在整个行程范围内轴移动时存在许多其他不希望的运动。实际上,每个机械定位轴共有六个与运动相关误差。这些错误源之一是如上所述的轴上错误。其他五个是“轴轴”几何误差。

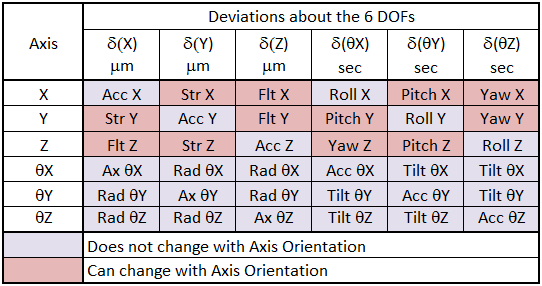
将多轴定位系统的轴和轴外误差源组合到表中,表明每个轴如何彼此相关。下面是六轴定位系统和每个轴的错误源的示例,因为它们与其他轴相关。由于每个轴有六个潜在的误差源,因此具有六个轴的定位系统将包括总共三十六个误差源。这些错误源中的每一个都可以对定位系统的执行能力产生负面影响。
最后,下面的表格概述了Aerotech定位系统客户要求我们使用计量技术进行测量的最常见要求规范。根据电动定位系统的使用情况和客户的应用,某些规格比其他规格更重要。
| 规格 | 目的(规格用于确定…) |
| 轴上精度 | 在平动或旋转轴上,所要求的位置与所测量的位置之差。 |
| 同轴的可重复性 | 沿着翻译轴或旋转在多个移动循环上的命令位置和测量位置之间的变化量。 |
| 离轴平面度误差 | 在直线上平移时存在多少垂直误差。 |
| 离轴直线度误差 | 在直线中翻译时存在多少水平错误。 |
| 轴外滚动/俯仰/偏航错误 | 直线平移时的角度误差是多少。 |
| 轴外轴误差 | 当旋转定位器绕其旋转中心旋转时,沿旋转轴存在多少误差。 |
| 轴外径向误差 | 当旋转定位器围绕其旋转中心旋转时,垂直于旋转轴的误差有多大。 |
| 轴外倾斜误差 | 当旋转定位器围绕其旋转中心旋转时,相对于旋转轴存在多少角像差或“摆动”。 |
| 轴外跳动 | 作为旋转定位器的表面表现出的表面呈现了多少位移围绕其旋转中心旋转。这与轴向或径向误差不同,因为正在测量实际表面而不是理论旋转轴。跳动表面的示例是导孔和旋转平台。 |
| 轴上最小增量运动 | 一个微小的运动是多么的可能。这是一个定位系统可以移动多小的物理分辨率。 |
| 同轴的速度误差 | 当定位系统进行特定的运动时,指令速度和测量速度之间的差异。 |
| 轴上的加速度误差 | 当定位系统进行特定的运动时,指令加速度和测量加速度之间的差异。 |
| 机械对准 | 在多轴定位系统中,两个或多个机械轴之间的偏差量。 |
运动计量学为什么重要
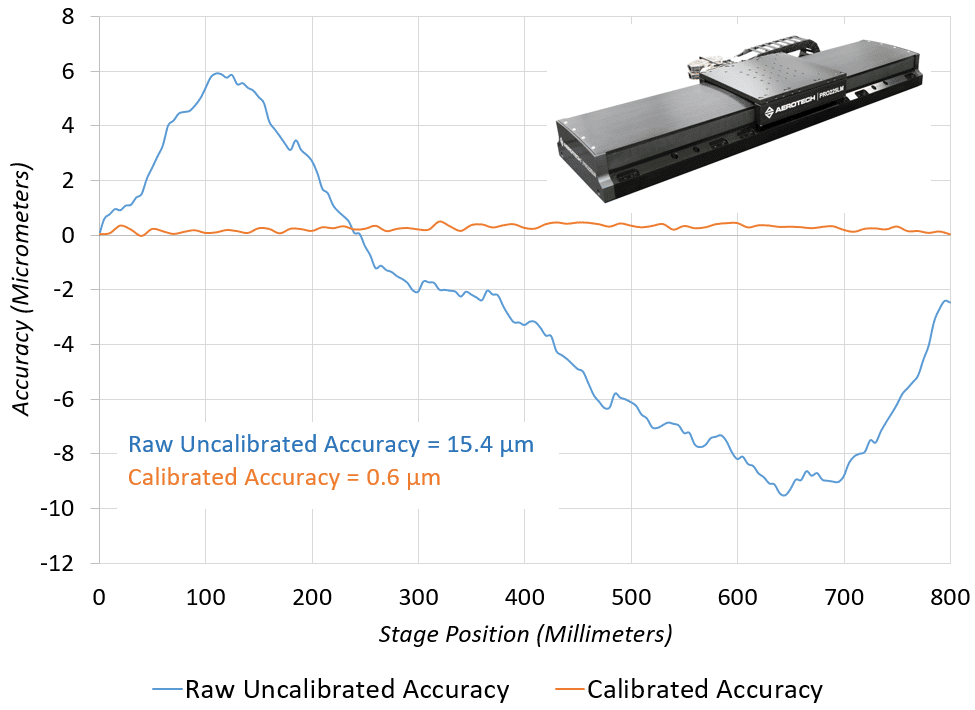
运动计量学可以让设计师理解和描述他们的已建成的机械系统,以便他们可以做出改进。这些改进可以是任何东西,从更高精度的定位到能够降低定位系统的成本。此外,如果运动性能可以测量使用计量,有办法补偿和消除不希望的运动误差主动。如图10所示,在补偿可测量和可重复的错误源时,常见的结果示例。
测量定位性能在工业应用中尤其重要,因为它描绘了一幅清晰的画面,如何再现电动定位系统将在现场发挥作用。改进和验证可重复性有助于确保批量生产的产品都具有相同的公差,并确保自动化流程可以在无需昂贵的人工干预的情况下连续运行。如果不使用计量测量定位系统的能力,就没有什么可靠的洞察力来了解制造商在尝试复制和扩大他们的电动自动化过程时应该期待什么。此外,运动计量可以作为一种可靠的方法来验证电动定位设备的制造商是否满足应用程序的运动性能要求。
Aerotech使用计量学并保证性能规格,以降低客户的风险。这是通过测量设备的实际定位性能来完成的,以显示它符合客户指定的要求。
如何使用计量技术进行运动测量
这些技术将专注于在定位设备的线性和旋转轴上进行运动计量,作为单轴或轴的组合。
包含正确的边界条件
导电运动计量的结果仅用在与其最终安装用例的情况下在与其最终安装的情况下进行测试时有用。表2中的每一个项目都必须表示将使用定位系统的预期工作条件。如果在两种情况下不匹配以下条件,可能会测试和使用的性能可能会大大变化。
| 进行计量时匹配的边界条件 |
| 定位设备所携带的有效载荷,包括质量、重心、惯性和刚度特性。 |
| 设备将看到的环境因素,包括温度和湿度。 |
| 该设备将用于重建的动态(运动轮廓)。 |
| 将安装定位设备的底座结构。 |
| 过程的敏感方向。了解是否是正在移动的过程工具或对象。这改变了计量工件位置。 |
| 有效载荷或工具在太空中使用的工作地点。 |
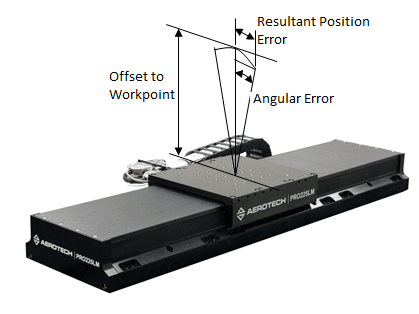
上表中的最后一个条件对于重建最终使用设备的情况尤为重要。这是因为当定位应用程序工作点或感兴趣点之间存在偏移时,存在另一个错误源,并且用于向闭环控制系统提供反馈的测量设备。此错误称为ABBE错误,并且随着空间工作点的偏移量增加而增加。设计者理解该过程发生并在此位置进行计量的空间中的点非常重要。
线性运动计量
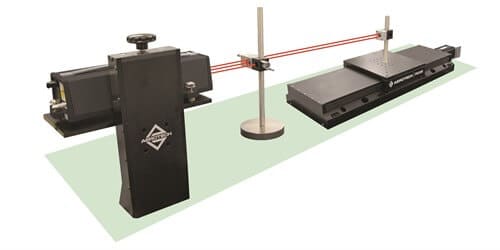
在线性定位轴上进行测量的最受欢迎的方式是使用激光干涉仪。移动光学器件安装在定位器的平移部分上,并且固定光学器件安装在定位器和激光本身之间作为参考。当激光到达固定光学时,它使用分束器分开。使用安装到固定电气架的后向图返回光束的一半。另外的一半行进通过固定光学器件,并由安装到移动定位器的光学反射。当两个激光器返回到激光单元时,两个光路之间的相移产生干扰图案。然后使用该干涉模式的变化来确定平移定位器的绝对位置。该方法可以与不同的光学设置一起使用,以确定设计师可能感兴趣的各种规范。例如,可以将不同的光学和棱镜添加到定位器的平移部分以测量其他误差源,如直线度或平坦误差。在某些情况下,自动调用器角度测量装置将用于测量诸如间距和偏航之类的误差。
线性测量测试的结果是显示定位器在整个行程中呈现错误的数据。正在测量的错误源取决于使用的测量伪像和使用。下面是所得到的精度和可重复性图,其显示干涉仪数据,因为定位器在正向和反向方向上通过全行进。Aerotech从前进和反向运行中获取最坏情况的错误,并且绝对将它们汇总以报告总准确性错误。Aerotech的可重复性计算为沿着定位器的总行程的任何一个测量点处的前向和反向方向位置之间的最大差异。
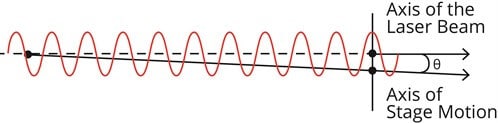
适当使用时,激光干涉仪具有亚纳米级的测量分辨率。必须实现许多最佳实践才能实现这种级别的分辨率。首先,环境稳定性是至关重要的,因为温度、湿度和空气湍流会干扰激光干涉仪设置产生的测量相位偏移。很多时候,环境的稳定性需要收集更少的点,以便整个计量过程可以在几分钟内完成,而不是几个小时。更快地运行测试的代价是测量的数据点的数量更少。然而,有时需要实现不会因环境变化而影响的结果。第二,静止光和运动光之间没有相对运动的距离称为死路径。激光单元只能在有相对运动的范围内补偿环境影响,因此尽可能地减小死路径距离是很重要的。最后,激光必须以最小的余弦误差对准光路。这种误差将随着线性定位系统的测量行程的增加而增加。
旋转运动计量
旋转定位装置与线性定位装置使用不同的技术进行测量。他们通常不使用激光干涉仪作为测量工具。自准直仪和电容传感器是最常用的计量设备。
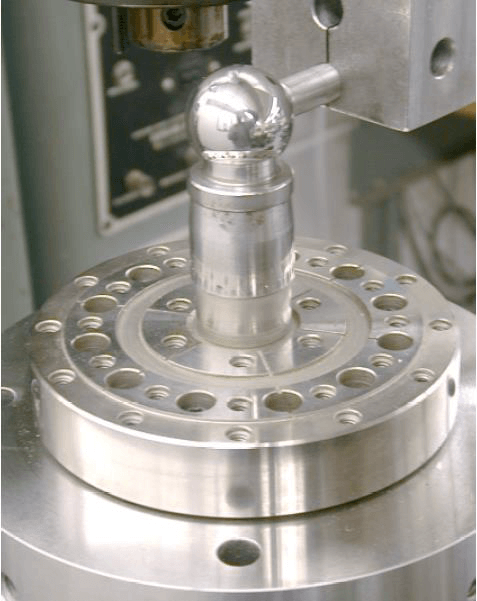
对于旋转定位器的轴上精度和可重复性,常用测量技术是主轴方法。这里,反射扁平镜附接到正在测量的旋转定位器的表面。定位自电管器,使得它可以看到平面镜中最轻微的角度变化。被测旋转定位器螺栓固定到称为主轴的另一个非常精确的旋转定位器。当被测旋转定位器旋转一定数量的程度时,主轴沿相反方向旋转相同的程度。我们假设主轴具有完美的准确性,并且通过自动调用器测量的任何偏差是由被测旋转定位器的不准确引起的。这使得使用高级主轴非常重要。Aerotech已经为这种类型的计量学建造并测试了自己的主轴,准确到0.6微频(<0.12弧秒和长时间稳定)。

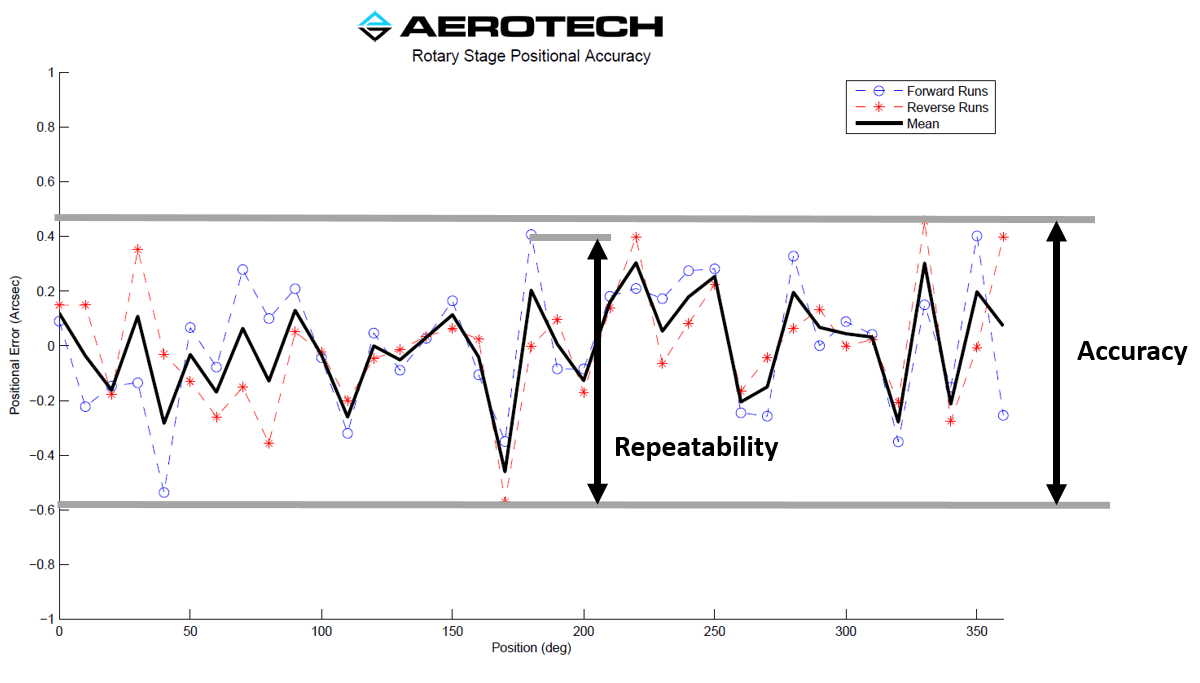
与线性计量结果类似,旋转定位器测试将报告定位器整个行程中的位置误差。对于Aerotech旋转定位器,总精度将报告为在整个测试行程中最低和最高误差值之间的绝对差值。可重复性被报告为在整个行程中任何给定位置的正向和反向运行之间的最大误差差。
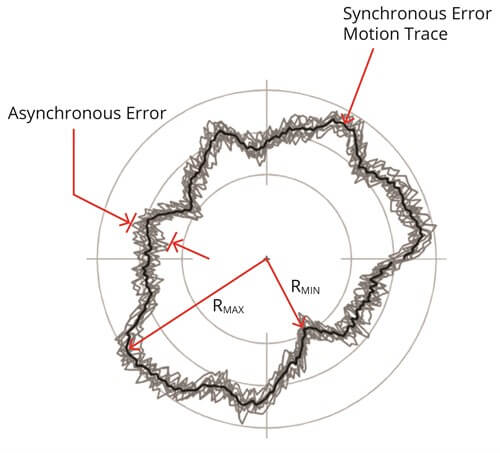
对于旋转定位器产生的离轴误差的测量,最常用的方法是使用精密地球作为测试伪迹,电容探头作为测量装置。这些设置允许测试误差运动,如轴向和径向误差。如果需要跳动,可用电容探头或电子指示器来测量被测表面。有关误差运动和跳动之间的差异的更多信息,请参阅表1。
测量数据的结果可以用来确定被测误差运动的可重复性和不可重复性成分。可重复的组件称为同步错误,不可重复的组件称为异步错误。正如你可以从下面的合成误差运动图中看到的,同步误差每次完成一个完整的旋转时都遵循相同的路径,而异步误差是随机的,看起来像一个围绕着完整旋转路径的噪声带。航空技术代表的总误差运动作为峰值误差的同步和异步组件在整个旋转定位器的整个行程。
如何使用运动计量来满足您的规格
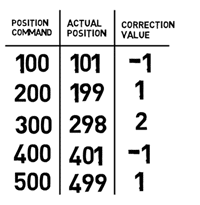
在测量它们后,有方法可以补偿不期望的运动错误。当然,一旦测量了定位系统的性能并展现出太多的错误,就会满足所需规格的一种方式是仔细重建机制。或者,可以重新设计系统以合并更高的精密引导表面或更准确,更好地放置闭合的反馈系统。不需要重新设计的另一种方式是使用校正技术从运动控制器的命令位置值中减去测量的运动错误值。新万博英超h使用校正是一种可靠且廉价的技术,可以快速补偿定位系统可能呈现的许多误差。最常见的校正方法是测量工作点的线性系统的轴误差,并构建运动控制器使用的表,以将测量的错误组件从命令的位置信号中减去。新万博英超h该校正值应通过运动控制器主动应用,并具有低延迟。新万博英超h
许多次,个体的轴错误只是阻碍运动系统性能的底层错误的子集。这在多轴定位系统中是常见的,因为存在运动误差的容差堆叠,随着自由度的增加。回到有六个错误源的每个轴,然后在添加更多的运动轴时复合。好消息是,一旦使用计量技术测量错误,设计人员通常可以在定位系统中使用其他轴来校正彼此的错误源。这称为横轴校正。
例如,随着XY定位器堆栈中的较低轴移动,它将表现出可使用激光干涉仪计量设置测量的直线误差。然后,可以将结果添加到校正表中,该校正表中命令在上y轴中的运动,以校正X轴中的错误,因为它通过行驶移动。使用横轴校正方法使得可以显着降低直线误差。
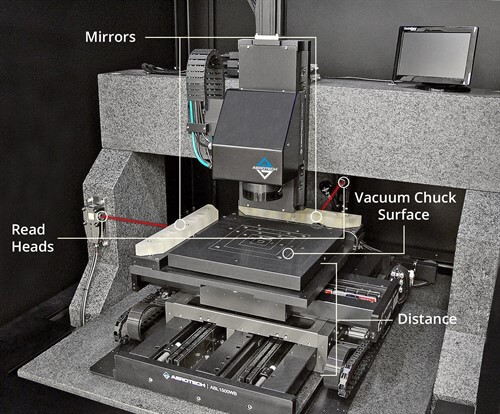
使用Metrology来补偿定位误差的另一种方法是添加封闭式运动控制器使用的原位反馈。新万博英超h例如,我们可以纳入相同的激光干涉仪测量系统,我们用于将离线计量进行离线计量,进入定位系统本身的设计,以用于连续测量。用于此的常见用例是在发生过程的升高工作高度处减少XY平面中的误差量。如图20所示,工作高度位于平坦真空夹头表面的顶部。因为该工作高度从轴承表面和编码器反馈位置升高,所以在真空夹头表面上会产生错误的误差。二维(2D)激光干涉仪可用于实时测量XY空间中的升高位置。该位置反馈可用于闭环控制,定位系统将不再需要担心ABBE误差效果(以及一些已删除的第三个效果,例如偏航错误)。
结论
进行运动测量是理解电动定位系统性能的关键步骤。将适当的边界条件应用到计量试验装置上,并使用正确的技术进行计量将产生有价值的测量数据。这个测量数据可以用来补偿定位系统中固有的或不存在的位置误差。如果应用得当,计量技术将提高定位系统的性能,并降低该系统无法满足应用要求的风险。在Aerotech,我们是为客户理解和执行计量的专家。