3D计量系统,定制工程运动系统,数据存储,功能概述,六角峰,集成自动化系统,激光扫描头,激光系统,医疗器械制造,运动控制平台,光学和光子,精密制造,科学研究机构,阶段&新万博英超h执行器,测试和检查
特征概述
使用A3200旋转命令为五轴系统
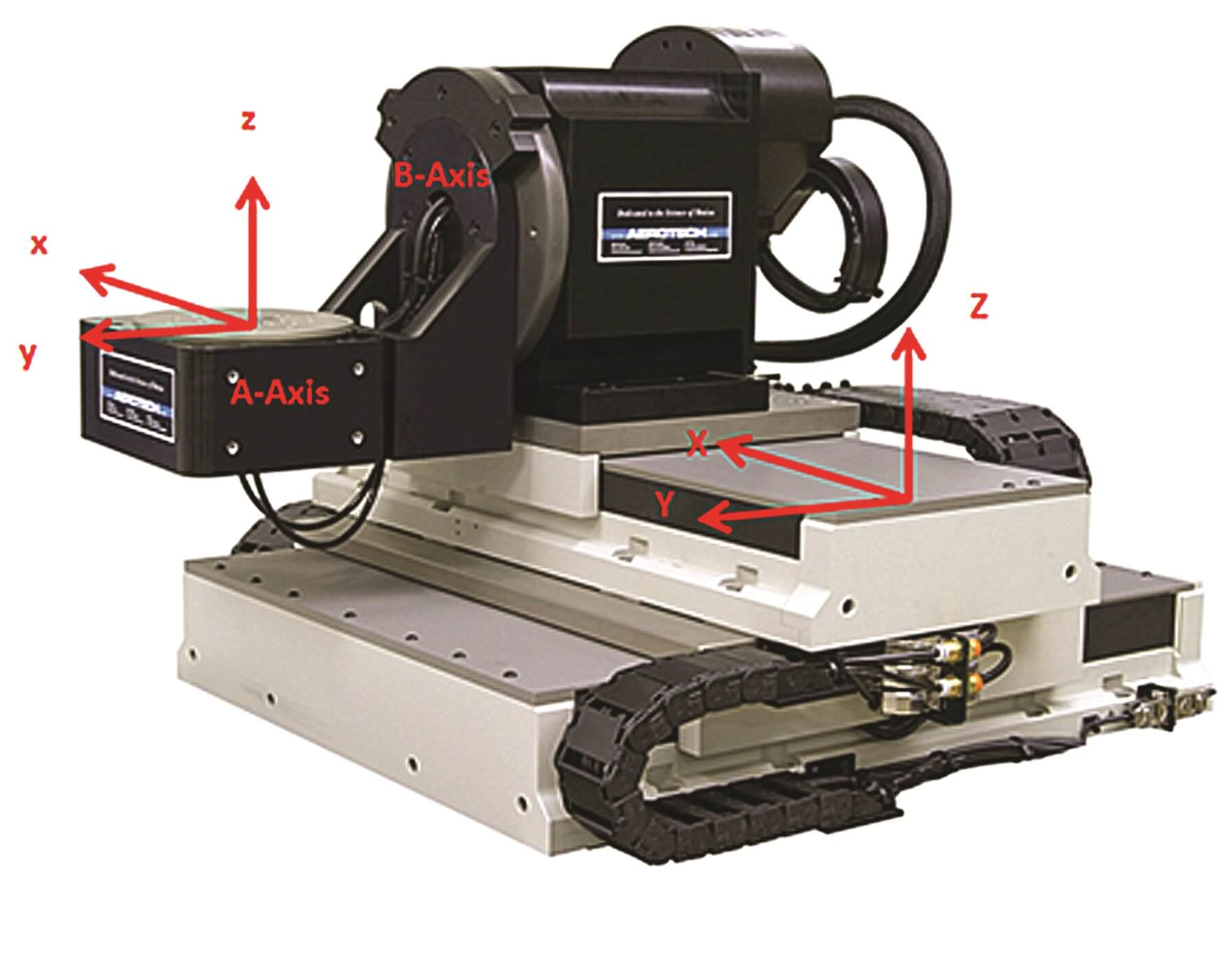
自动化3200(A3200)中的旋转命令实现旋转矩阵操作。该功能可用于在包括旋转运动的机械致动器上变换坐标。可以将多个旋转命令配置为与具有多于一个旋转轴的系统一起使用。由两个旋转轴和三个线性轴组成的五轴系统是这种系统的示例(图1)。此应用笔记将讨论为此类型的应用程序设置rotation命令的过程。

操作理论
五轴系统能够使用垂直于给定点的工具访问半球上的任何点。大多数3D CAD工具可以输出工具路径,其中包括曲面上的x/y/z坐标,以及以两个角度表示的曲面的法线(图2中的A和B)。
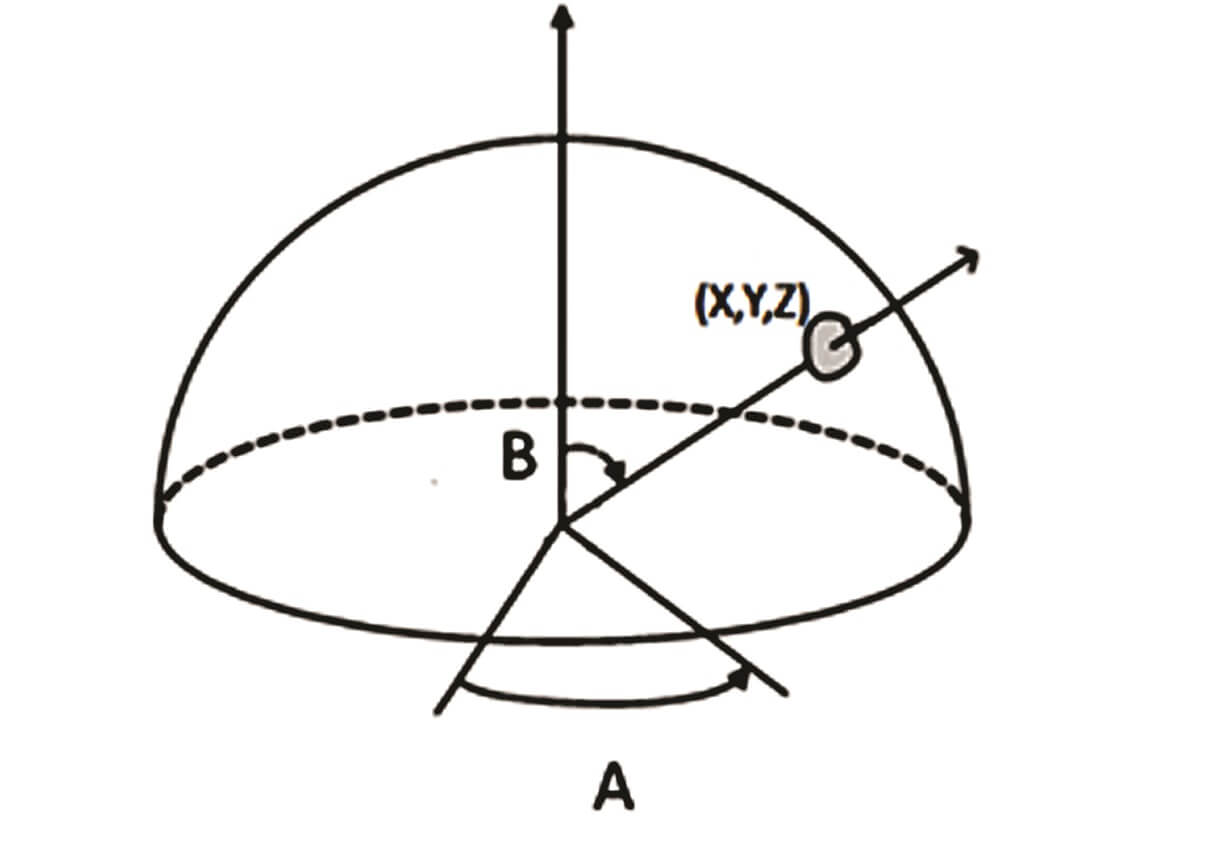
Aerotech的旋转功能可以采用这些部分X / Y / Z位置和旋转角度,并将这些信息实时转换为伺服轴的位置命令。由于部件位置与伺服系统位置不同,因此必须使用两组轴 - 一个轴来定义部分位置和另一个伺服轴的位置。部分轴系统由三个虚拟轴和此示例组成,我们已命名为这些轴X / Y / Z。物理轴将被映射到线性伺服轴X / Y / Z和旋转轴A / B.
设置旋转命令
Rotation命令将从一个三轴笛卡尔系统(Inneupaxes)的数据转换为另一个三轴系统(输出)。系统中的每个旋转轴都需要单独的旋转命令。最多10个旋转命令一次可以激活。该示例将需要两个旋转命令,一个用于每个旋转轴。
旋转命令如下所示:
旋转1输入x y z输出x y z
输入轴和输出轴的顺序非常重要。前两个轴定义一个平面,第三个轴是该平面的法线。第三个轴也是旋转发生的轴。轴的顺序意味着每个轴的正移动方向、正旋转方向以及在没有旋转活动时输入轴和输出轴之间的关系。每一项都将分别加以审查。
右手规则
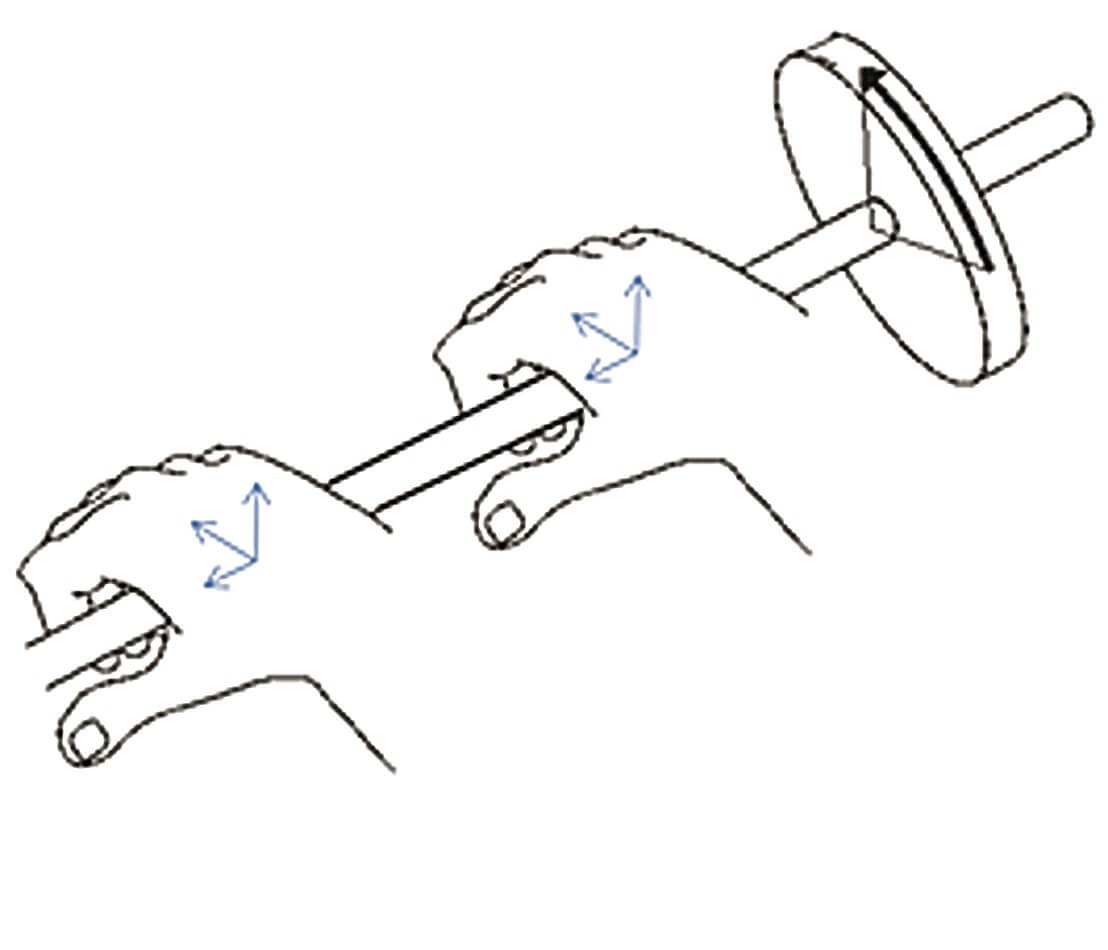
轴的取向由右手规则限定,其中沿着食指的三个点的第一轴线,第二轴沿着中指和沿着拇指点的第三轴点点(图3a)。
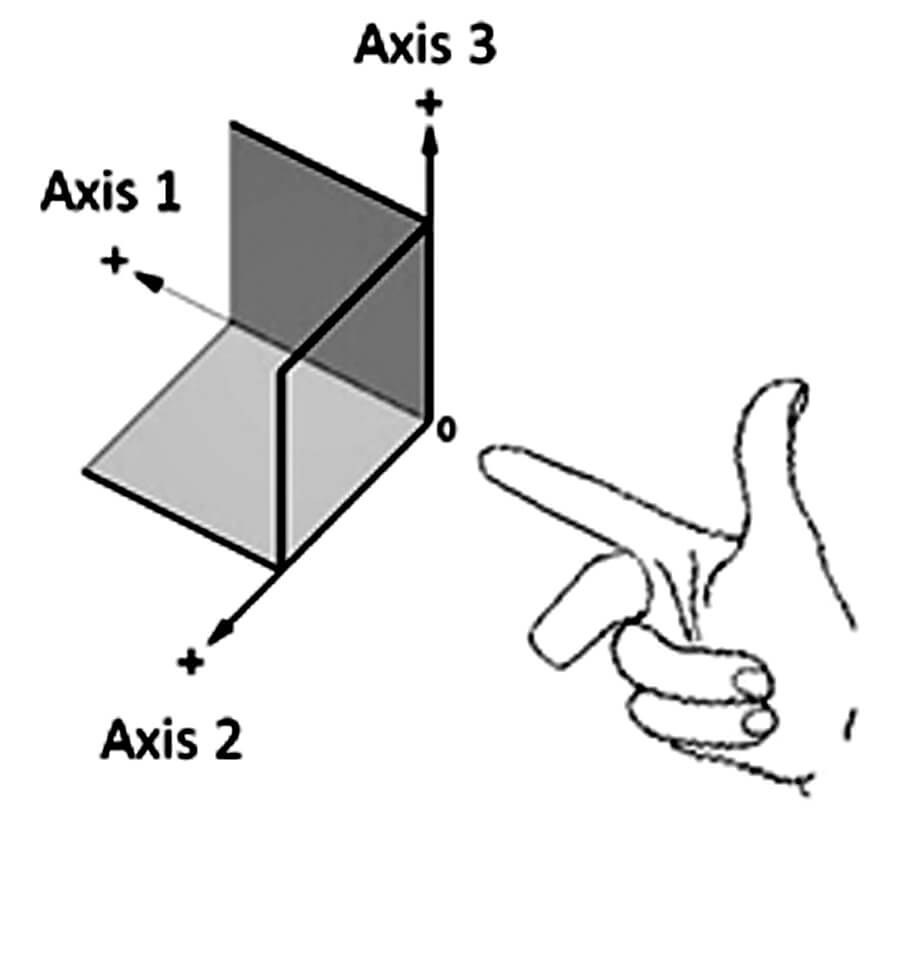
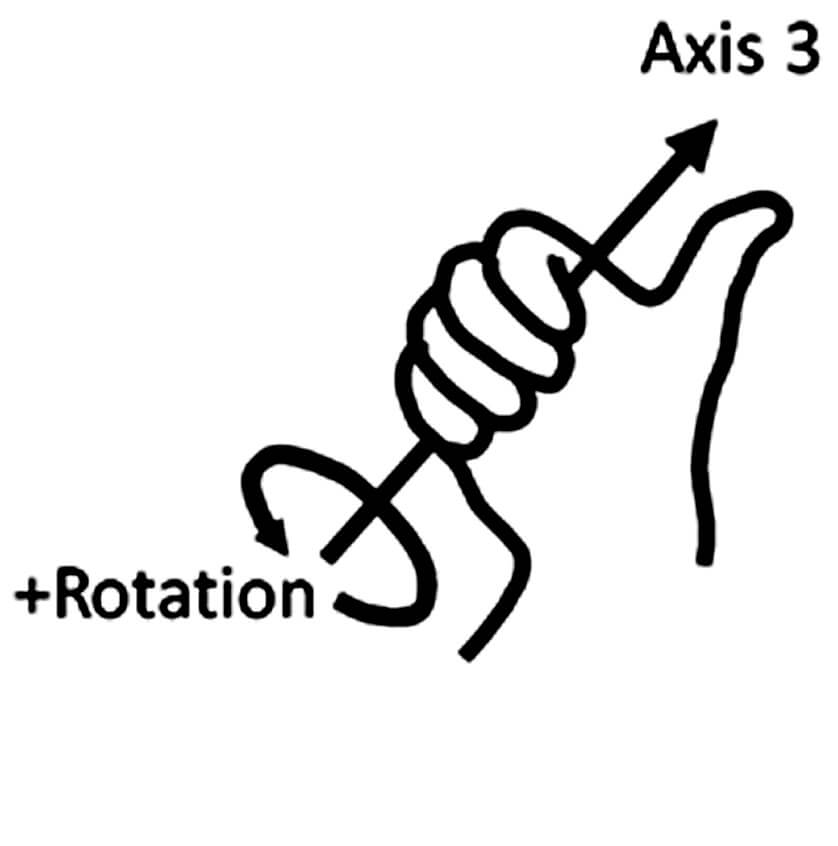
该系统的旋转发生在轴线3中。轴的正方向也由右手规则限定,其中沿轴线3的正方向和右手的卷曲指点的右手点的拇指表示正旋转角度(图3B)。
在定义虚拟和物理轴的正向移动方向时,必须观察到这些关系。从输入到输出轴的映射从虚拟坐标系开始,并返回物理。在过程的每个步骤,映射轴的正移动方向必须彼此一致,右手规则一致。
图4中所示的取向是可能的四种中的一个。通过在Z轴周围90度的间隔旋转X / Y平面来实现其他三个。可以更改任何系统中轴的名称以满足应用程序要求。非常重要:轴的正运动的定义是固定的,基于箭头的方向是指向插图。一旦坐标系设置好,轴或零件程序的正移动方向必须改变,使之与坐标系指示的方向一致。
根据我们在图4中定义的映射,如果没有激活旋转,在+x方向上的运动将导致在+x方向上的运动,在+y方向上的运动将导致+y,在+z方向上的运动将导致+z。
旋转命令的配置从部件坐标帧开始,并朝向伺服轴坐标帧工作。每个旋转轴都需要一个新的旋转命令。最靠近部分坐标帧的旋转轴用作第一旋转命令的输入。下一个旋转轴与下一个旋转指令相关联,直到已经定义了系统中的所有旋转轴线。
对于图4所示的系统,第一个旋转轴是绕z轴旋转x/y平面的A轴。根据右手定则,正旋转运动将是逆时针方向的。旋转命令和旋转轴的指定如下:
旋转1输入x y z输出x y z
旋转1角A
旋转角度命令具有反相移动方向并偏移角度的参数。在轴名称从1到-1变为-1后,将正向移动方向颠倒正向移动方向。最终参数用于指定角度偏移。该偏移可用于补偿在附件期间可能发生的角度位置的变化。
下一个旋转轴是B轴,它在z / x平面上围绕我们的输入平面的Y轴(按右手规则)旋转。第二旋转命令的输入如下:
旋转2输入z x y输出z x y
旋转2角度B 1,0
我们将z/x平面绕y轴旋转。从0角度开始,z轴上的输入运动导致z轴上的运动,x轴上的运动导致x轴上的运动,y轴上的运动导致y轴上的运动。
设置了应承担的偏移量
在大多数应用中,旋转轴的旋转中心彼此偏移。另外,部分坐标系的原点可能不直接位于旋转轴的中心,如图5所示。旋转位移命令用于定义旋转轴和部分坐标系之间的偏移。位移命令对所有三个轴具有偏移值。基于从参考点到旋转点的距离来计算偏移量。位移的符号基于从参考点到旋转点的移动方向。
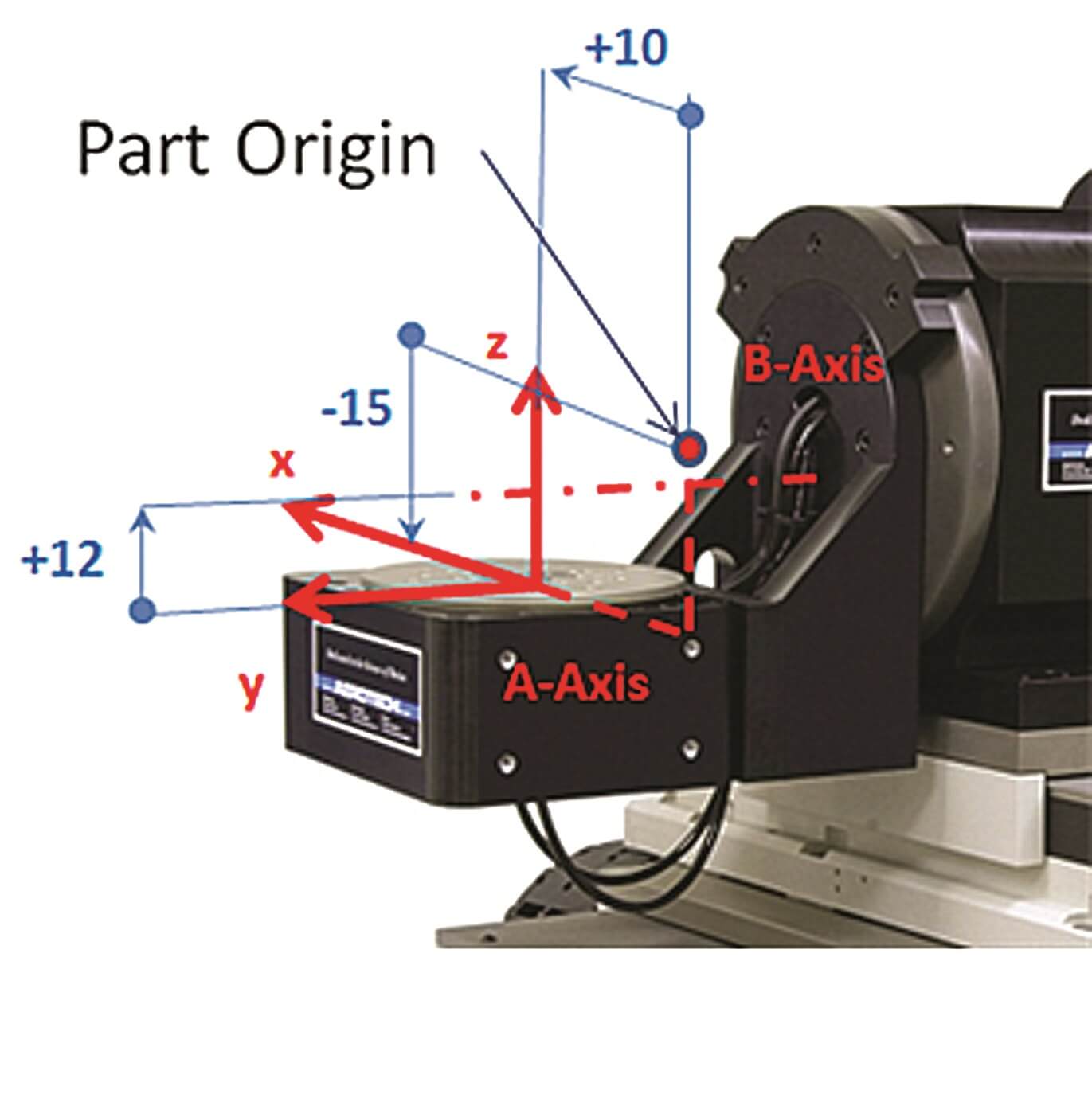
使用我们的示例系统,假设A和B轴旋转相交,桌面上方的起源部分抵消15毫米的轴和抵消10毫米在X方向上,和B轴中心旋转平行于直线与y轴和位于12毫米高于y轴。基于此配置,旋转命令的偏移量如图5所示。
从图中,沿轴向轴方向轴向轴的旋转距离的距离是+10。沿Z轴方向沿零件原点到旋转中心的距离为-15。零件原点与Y轴线符合,因此偏移在此方向上为0。
第二旋转的偏移以类似的方式计算。起始点现在是轴上的X / Y / Z帧的起源,我们将偏移量计算到B轴的旋转点的原点。B轴的坐标框架必须放置在其旋转轴上。该坐标框架的起源可以是沿旋转轴的任何地方,因为沿着B轴的角位置不会随着旋转起源所在的函数而变化。例如,如果圆形管围绕其中心旋转,则管道上的任何点的角位置都不会基于沿着旋转的管道的点而改变(图6)。
因此,我们可以将B轴的旋转点的起源直接放置在轴的旋转点上方,这在x和y方向上给出了“0”的偏移。当我们在+ Z方向上从轴的位置的位置移动到轴的轴的表面上的位置,z偏移是+12。偏移按顺序排列在旋转输入命令中的轴定义。对于第一次旋转,顺序是X-Y-Z,并且对于第二次旋转,顺序是z-x-y
旋转1位移10,0,-15
旋转2位移12,0,0
旋转命令的启用/禁用方法如下:
旋转1开/关
旋转2开/关
恒定速度/表面速度问题
当在A3200(速度接通)上的轮廓处于活动状态时,控制将基于任务加速度参数加速向量速度,直到它达到由“F”字给出的编程向量速度。该速度将在整个程序中保持,直到遇到迫使减速的条件。保持局部的恒定速度对伺服轴的运动具有显着的影响,因为它们可能需要瞬间改变速度或方向。
监视弧中的加速度或检测到两个程序线之间的非正切移动的“标准”远程将不会直接解决此问题,因为加速度由旋转命令间接生成。有两种额外的方法可用于限制物理轴的加速度。
第一种方法是在伺服轴的速度命令流上使用一个滤波器。该过滤器将有一个类似于斜坡的效果,但它也将增加一个延迟的轮廓,这将导致路径偏离编程的路径。trajectory yfirfilter设置了应用于速度指令流的FIR (Finite Impulse Response)滤波器的长度。过滤器中的每一次“轻拍”都相当于0.125毫秒的时间间隔。要添加50毫秒的过滤,参数将被设置为50/0.125 = 400。
减少加速度的第二种方法是设置相关轴加速度极限。A轴和B轴被认为是相关轴,因为它们的速度命令来自虚拟的x/y/z轴。x/y/z轴的短移动时间加上A/B轴的长移动可能导致A/B轴的高速移动。DependentCoordinatedAccelLimit参数可用于限制相关轴的加速度和产生的速度。
示例程序
以下是一个简单的示例,它按顺序显示所有命令,包括设置对从轴上的加速度限制的设置。
启用x y z a b x y z
旋转1关闭
旋转2了
速度
坡度500.
F100.
主页x y z a b x y z
秒
绝对
旋转1输入x y z输出x y z
旋转1角度A 1,0
旋转1位移10,0,-15
旋转2输入z x y输出z x y
旋转2角度B 1,0
旋转2位移12,0,0
dependentcoordediptaccellimit = 4000.
;将物理X/Y/Z移至起始位置
;此位置与机器及零件有关
对ROTATION操作没有影响
g0 x 5 y60 z23
;将旋转轴移动到启动位置
G0 A0 B0
;将虚拟轴移动到启动位置
g0 x9 y0.
scopetrig.
旋转1 on
旋转2 on.
G1 X10 Y2 Z1 A2 B3
G1 X12 Y3 Z1.4 A2.5 B3.7
G1 X9 Y2 Z1.8 A1.5 B3.8
G1 X8 Y2 Z2.2 A0 B0
旋转1关闭
旋转2关闭
参考资料
搜索A3200帮助文件索引有关下面列出的主题的更多信息。大多数这些条目都有多个项目,可提供有关本文档中使用的所有命令的其他信息。
- 旋转
- DependEntCoordediptAccellimit.
- TrajectoryFirfilter.
- 轴类型概述
- 展望